

I have started 3 new projects. I mainly wanted to use the laser cutter at school before the school year was over. So I made these things which I will be fully constructing in the upcoming weeks. I just threw stuff together for some photos.
My custom controller v2:

A rover:

and Hexapod V2:

I will post these things on their own pages soon so I will not go in depth too much. I just need some more progress before I post robot pages. I also have little to no parts that I need to make these robots at this moment.
So let me start with my new controller. My first one I made, which was used for my AGV, was not pretty and is now broken. I decided to go ahead and make a new one. This one is smaller. It will have a LCD, 3 buttons, a potentiometer, the joystick and accelerometer from a Wii nunchuck, Xbee, and of course a battery pack and power switch.


The Wii nunchuck board will bolt right on if I measured correctly :)
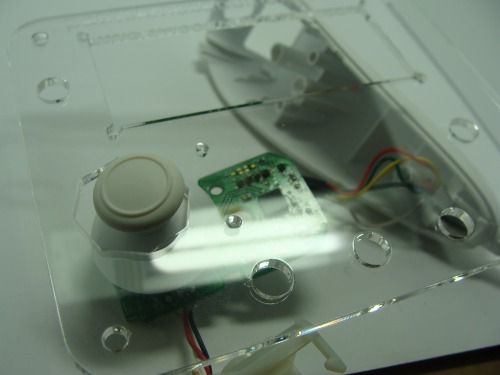
I measured correctly ;)



I copied the shape of the joystick hole from the Wii controller.


The microcontroller board that will run this is one that I am designing. It is basically a LCD back pack that will have inputs for the things on the controller. Should prevent rat nests.

Next is the rover. It has 4 gear motors that get mounted on the bottom once I buy the mounts. It has 3 decks. The bottom deck will have the motors, batteries and a sensor mounted on a servo. This sensor will scan the ground to avoid running over obstacles. The second deck will hold the electronics. This includes a seeeduino mega, motor controllers, Xbee, and some light sensors for now. The top deck has a LCD, buttons, compass, and a distance sensor mounted on a servo to scan for obstacles.
Bottom plate:

Middle plate:

Top plate:


Servo:

Sensors:

Motor and mounting holes:

Here is hexapod V2. It will consist of 5 standard servos, a Ping sensor, and one of CTC's boards.


My method of connecting the pieces of the legs together did not work perfectly so I resorted to hot glue :P




https://www.youtube.com/watch?v=KywbGmPINA4