

Rhex

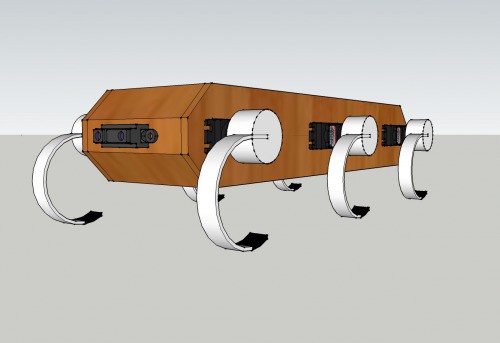
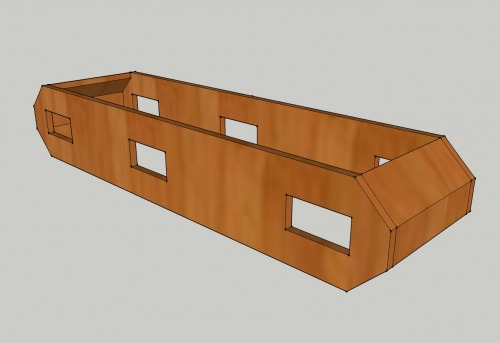
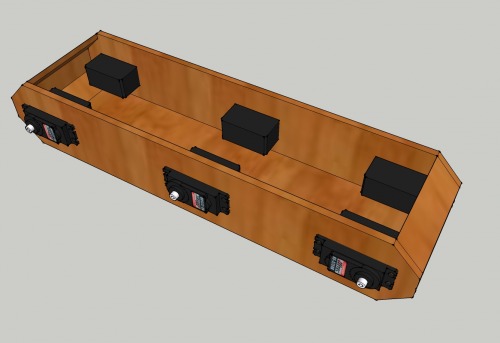
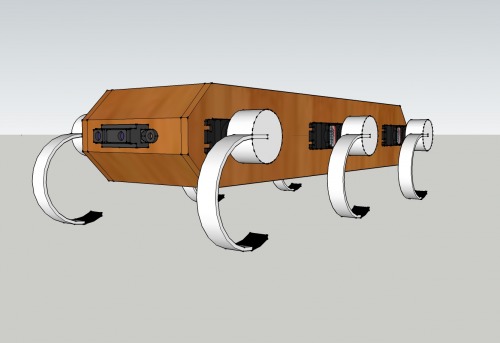
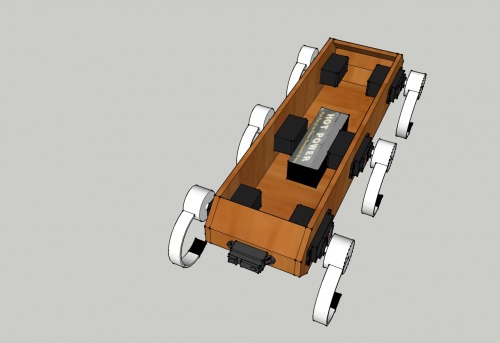
I definitely want to build a 6 legged Rhex robot. Below are some drafts I made today with Sketchup. 6 standard servos HS-325, a LiPo battery, two Sharp IR distance sensors and a tilt switch.



2011.2.14
I thought about how to synchronize the legs of my Rhex robot. I want to use servos, no kind of encoders and geared motors. But the servo would need to have two functions: Continuous rotating and moving to a desired position. So I came up with following idea:
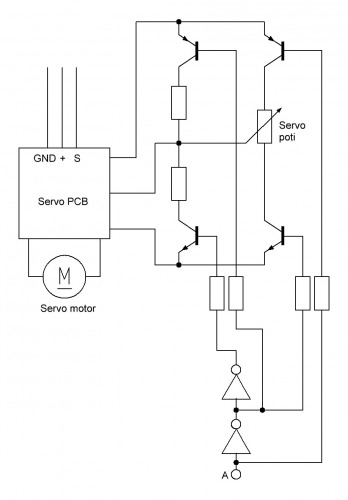
The end stopf on the servo gear needs to be removed but the potentiometer spindle must be still connected to the motor. The potentiometer needs to be without end stop(s). At least some micro servos have this kind of potentiometer without end stop(s). If A=high, the servo rotates continuous, if A=low, the servo moves to a desired position. So far the theory.
2011.2.15
Built a prototype of the suggested servo, but it works not like designated. One problem is that the outer potentiometer pins are not directly connected to GND and VCC of the servo PCB. Back to the drawing board...
Dismantled a potentiometer from a cheap standard size servo. Just the marked end stop must be removed with a sharp knife and you have a continious rotating potentiometer. The values of one turn is from 0-5kΩ and on a very short distance the wiper contact is disconnected from the fixed contacts.

2011.2.16
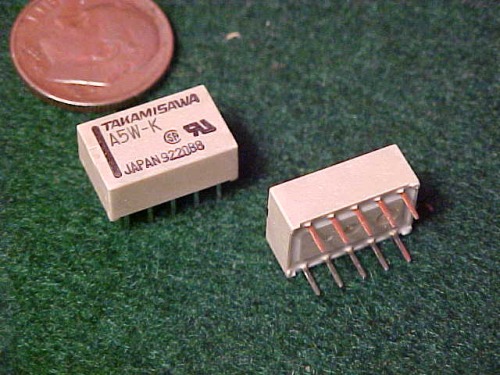
Using now a relay to avoid all potential and voltage drop problems:

Ordered TAKAMISAWA A5W-K PCB relays. I have attached the data sheet. They are very tiny, just like a 10 pin DIL chip. And they are DIL socket compatible:
2011.2.17
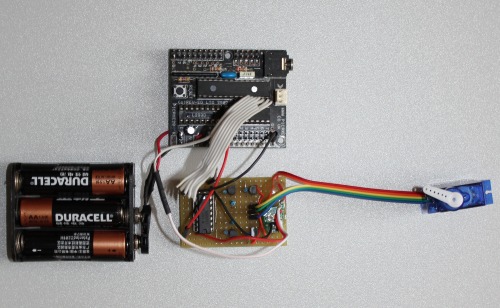
Finally it works. Here is the current setup:

The modified now continious rotating potentiometer works fine. I'll make a short video at weekend. Instead of a relay I will use analog switches at the final version as Oddbot has suggested.
Thanks for helping to keep our community civil!
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
You flagged this as spam. Undo flag.Flag Post
Your post is currently under review by our moderation team. The review process usually takes up to 48 business hours.
You can track your post's status in the "My Content" section of your profile. Once approved, it will be published and visible to others.

Thank you for contributing to our community!