

Lynxmotion Quadrino Nano – Advanced ESC Calibration

 When using the Lynxmotion Quadrino Nano as a UAV flight controller (or another MultiWii based controller), the ESC's (electronic speed controllers) used to drive the brushless motors need to be calibrated. This is to normalize the RPM output for a given input signal on all motors. ESC's are not all equally made and reference points therefore need to be setup. You can calibrate the Maximum and Minimum value directly by connecting a ESC to an R/C receiver but, this will not send the same signal as the flight controller and you might loose precious RPMs at the very top. By using this method, you would also need to calibrate each ESC one by one; on a Quadcopter it's not too bad but for a Hexacopter it could take quite some time. With the Quadrino Nano, there is a better way since the software that runs in this flight controller allows for a calibration procedure, but it does require a full flash of a Not-Flyable version of firmware which needs to be overwritten by a real version afterward. It is also very important to pay attention to each calibration step in order to avoid any injuries since the calibration of an ESC requires to throttle all the way to the maximum speed and is some cases (if not properly done) can have your motor spin when you do not intend it to.
When using the Lynxmotion Quadrino Nano as a UAV flight controller (or another MultiWii based controller), the ESC's (electronic speed controllers) used to drive the brushless motors need to be calibrated. This is to normalize the RPM output for a given input signal on all motors. ESC's are not all equally made and reference points therefore need to be setup. You can calibrate the Maximum and Minimum value directly by connecting a ESC to an R/C receiver but, this will not send the same signal as the flight controller and you might loose precious RPMs at the very top. By using this method, you would also need to calibrate each ESC one by one; on a Quadcopter it's not too bad but for a Hexacopter it could take quite some time. With the Quadrino Nano, there is a better way since the software that runs in this flight controller allows for a calibration procedure, but it does require a full flash of a Not-Flyable version of firmware which needs to be overwritten by a real version afterward. It is also very important to pay attention to each calibration step in order to avoid any injuries since the calibration of an ESC requires to throttle all the way to the maximum speed and is some cases (if not properly done) can have your motor spin when you do not intend it to.
Understanding the Risks:
When you power the ESC's they are waiting for a Low signal to go in an Arm state. Using a calibration firmware will have your Quadrino Nano Throttle all the way up when you apply power, but if you power both the ESC's and the Quadrino Nano at the same time you won't have any issues. The ESC's will go in calibration mode without spinning the motors and once the Quadrino Nano throttles down they will Arm themselves. The danger appears if you power everything, but for a reason you Reset the Quadrino Nano, since the procedure already occurred and the ESC's are in Arm state, the Quadrino will re-do the calibration and throttle up and motors will spin. So make sure you remove the propellers when doing this, never reset the Quadrino Nano and always flash a normal firmware with the FCT after the calibration.
 |
  |
Since there are possible risks which could result in injuries
we ask that you fully read the following article before even attempting this procedure
Understand the ESC:
How do ESC's work regarding R/C signals? The ESCs need a signal in PWM (pulse width modulation) which is usually sent by an R/C transmitter. At power-up the ESC is looking for a known signal and will not put itself in an armed state unless it does see a low value first (but high enough to avoid arming without signal). A normal calibration is initiated by giving the ESC a high signal at power-up followed by a low signal.
Standard Calibration Procedure:
- Make sure your ESC is connected to a brushless motor (to hear the beeps)
- Connect the ESC to the Throttle channel of your receiver / transmitter
- Raise the Throttle to it's highest position (R/C Transmitter - Throttle Up)
- Power the ESC; there will be a boot sound usually three fast beeps each higher in tone followed by one beep to confirm the High signal (ESC - Power-Up)
- Lower the Throttle to it's lowest position and you will hear two fast beeps confirming the Low signal (R/C Transmitter - Throttle Down)
- A long beep will confirm the calibration
- Calibration is done and now the motor is Armed, if you raise the throttle it will spin
 R/C Transmitter - Throttle Up R/C Transmitter - Throttle Up |
 ESC - Power-Up ESC - Power-Up |
 R/C Transmitter - Throttle Down R/C Transmitter - Throttle Down |
All this can be done with the Quadrino Nano running on MultiWii. It consists of loading the board with a firmware that has been designed only to calibrate and which will not allow for flight. This firmware will do the exact same procedure as the manual one above at power-up but on all ESC's at the same time and using the real range of signal that will be sent to the ESC's when flying.
MultiWii Calibration Procedure:
- Make sure your ESC's are connected to their brushless motors (to hear the beeps)
- Confirm the connection between your ESC's and the Quadrino Nano (Lynxmotion UAV - Quadrino Nano - User Guide)
- Connect your Quadrino Nano with the supplied USB cable
- Open the FCT (Firmware Configuration Tool) application available for download HERE (FCT - Home Page)
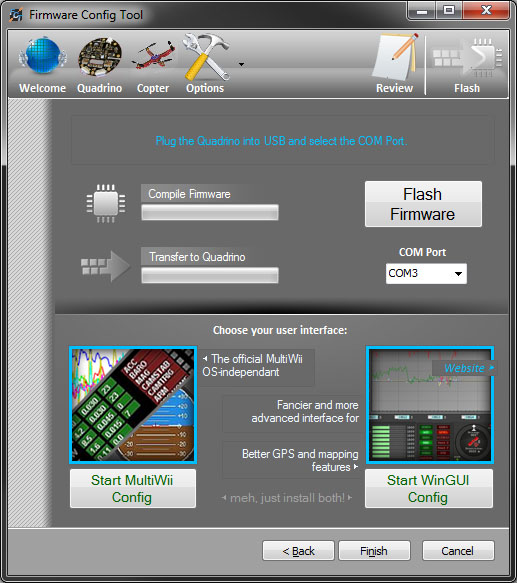
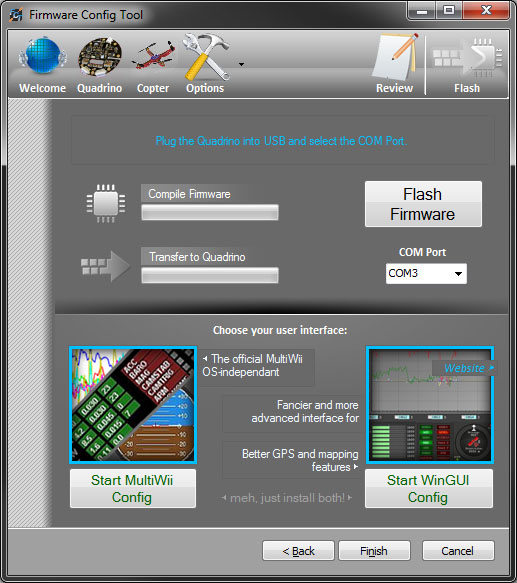
- Go all the way to the "FLASH" page located on the top right (FCT - Flash Page)
- Hold the "ALT" keyboard key while clicking on the "Flash Firmware" button
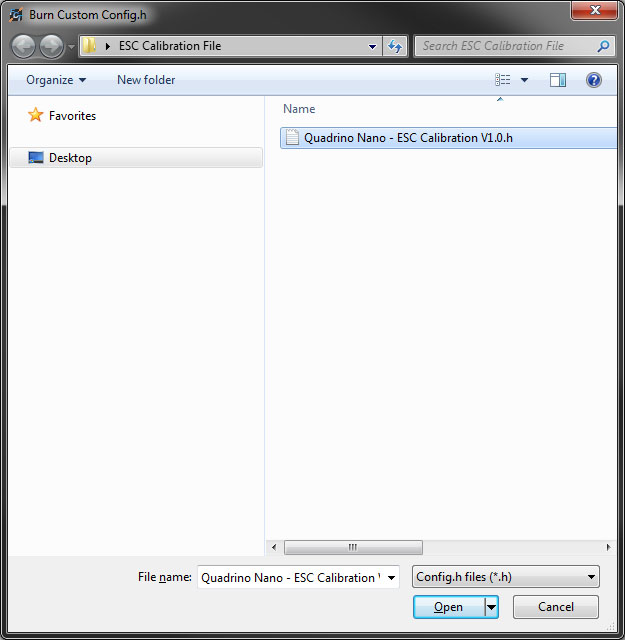
- In the the new window, browse and select the Quadrino Nano - ESC Calibration V1.1.h config file (FCT - Burn Custom Config.h)
- The FCT will flash your Quadrino Nano with this ESC Calibration firmware (FCT - Flashing Firmware)
- Remove the USB cable and connect your battery which will power your ESC's and the Quadrino Nano
- You should hear three fast beeps followed by one short beep (high signal calibration)
- You should hear two fast beeps followed by one long beep (low signal calibration)
- Calibration is done
{kind=link}
Now you must use the FCT to flash a real firmware to avoid any unwanted motor spins in the future.
 FCT - Home Page FCT - Home Page |
 FCT – Flash Page FCT – Flash Page |
 FCT - Burn Custom Config.h FCT - Burn Custom Config.h |
 FCT - Flashing Firmware FCT - Flashing Firmware |
Information:
For the advanced users, the calibration defined in the MultiWii code (found in the config.h file) which is already setup in our Quadrino Nano - ESC Calibration V1.0.h is as follow: /********************************************************************/ /**** ESCs calibration ****/ /********************************************************************/ /* to calibrate all ESCs connected to MWii at the same time (useful to avoid unplugging/re-plugging each ESC) Warning: this creates a special version of MultiWii Code You cannot fly with this special version. It is only to be used for calibrating ESCs Read How To at http://code.google.com/p/multiwii/wiki/ESCsCalibration */ #define ESC_CALIB_LOW MINCOMMAND #define ESC_CALIB_HIGH 2000 #define ESC_CALIB_CANNOT_FLY // uncomment to activate
Thanks for helping to keep our community civil!
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
You flagged this as spam. Undo flag.Flag Post
Your post is currently under review by our moderation team. The review process usually takes up to 48 business hours.
You can track your post's status in the "My Content" section of your profile. Once approved, it will be published and visible to others.

Thank you for contributing to our community!