

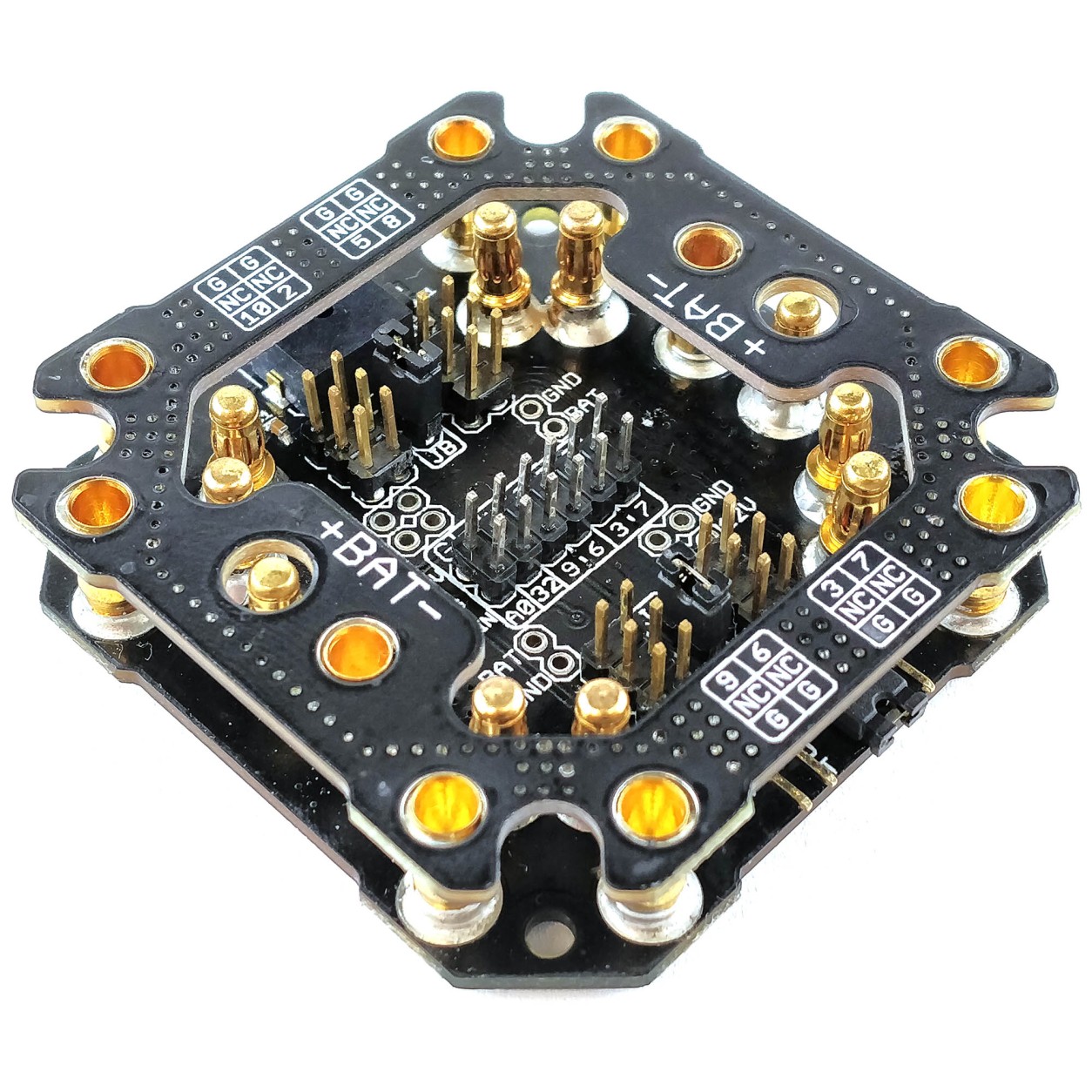
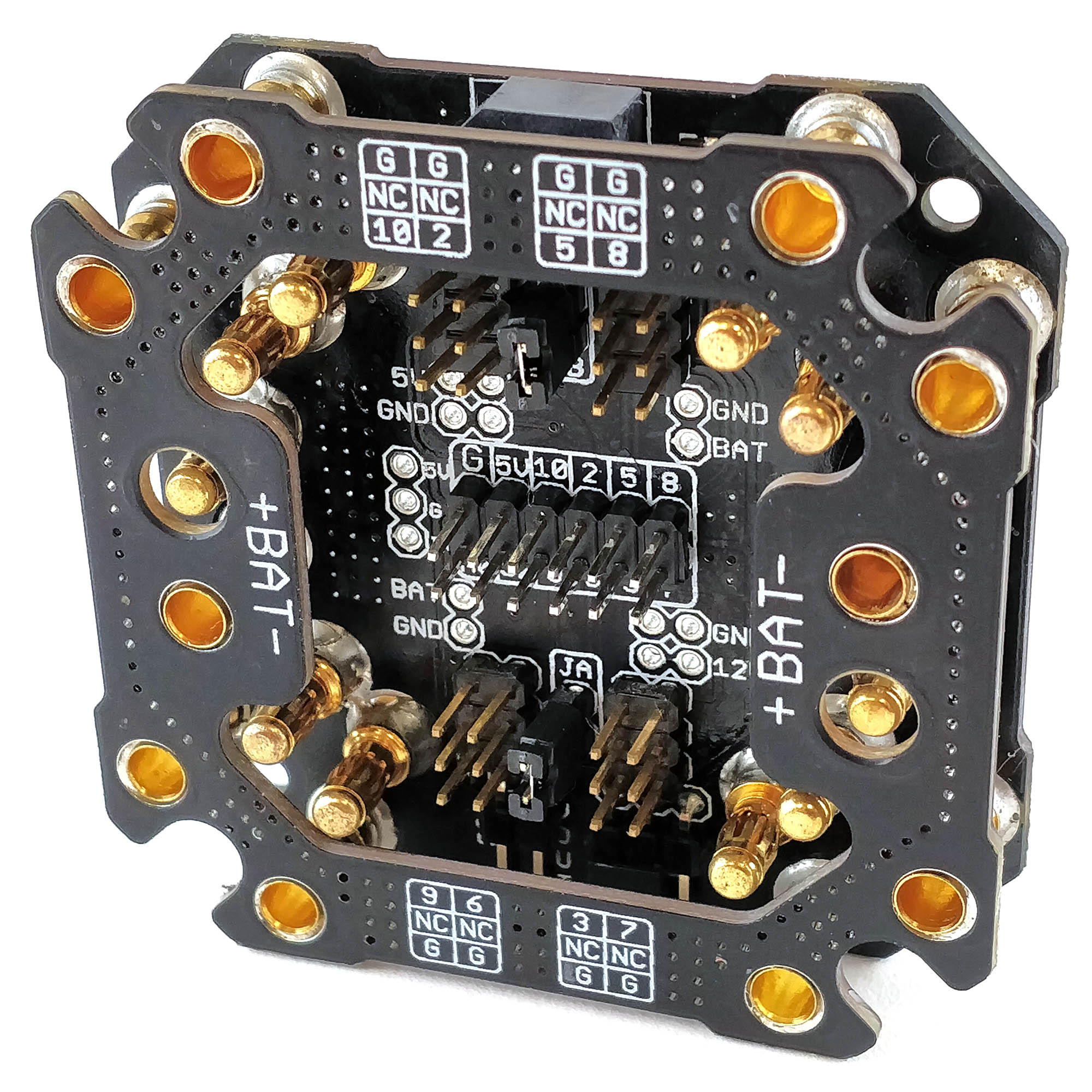
Lynxmotion - MES Power Distribution Board (PDB)

 |
 |
 |
Main Features
General: Affect any users
- 20A continuous current per motor & up to 8 BLDC motors (160A)
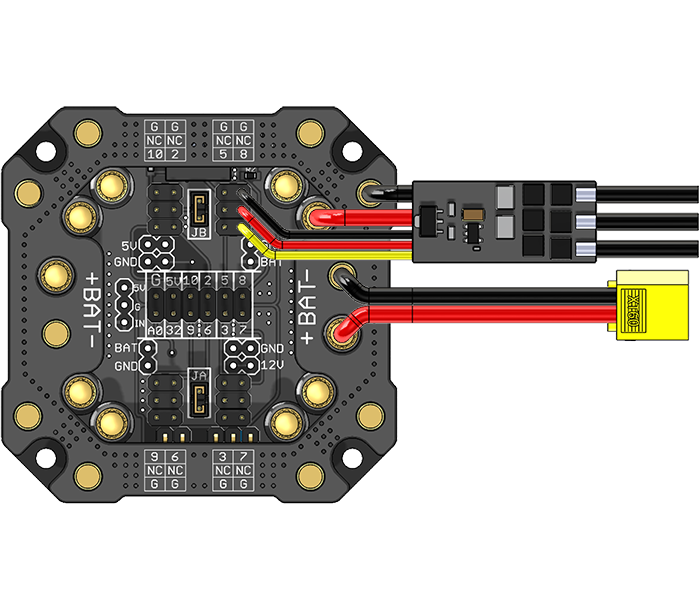
- Two battery inputs w/ XT60 harness (one harness supplied in the kit)
- Location to add a standard 5V BEC (voltage regulator)
- Dual PCB construction
- Standard 45mm mounting pattern
- 3.5mm bullet connectors for each ESC's
- Laser-cut foam for bottom protection
Lynxmotion Quadrino Nano Compatibility
- Single wiring harness for the Quadrino Nano (sold separately)
- Breakout of the ESC connections with proper localization related to MultiWii
- Amplified buzzer for audible alarm
- Output for an optional alarm with either 5V or Vin power (LED's for example) with a jumper for selection
- Battery monitor connection via analog input
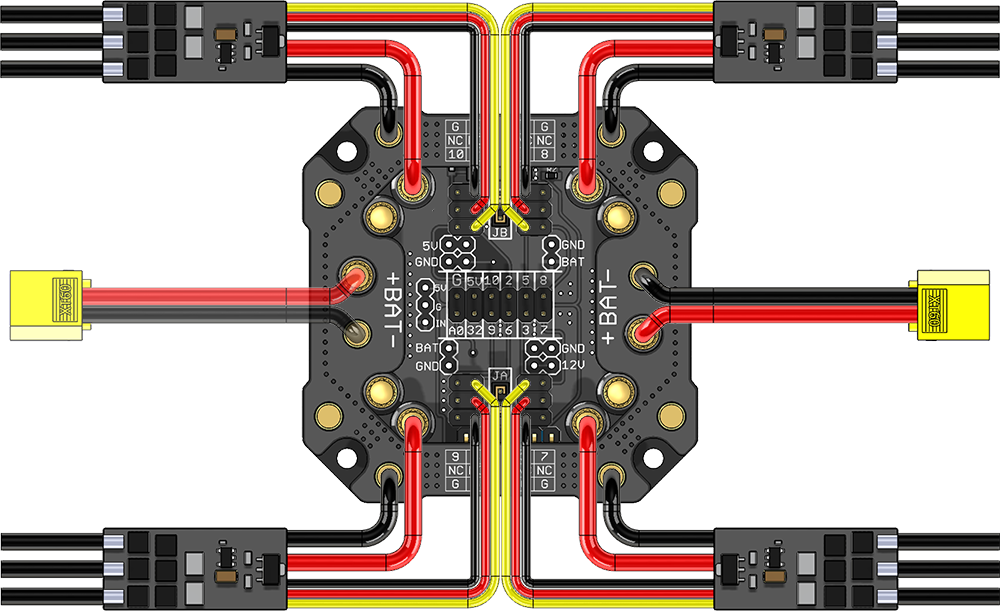
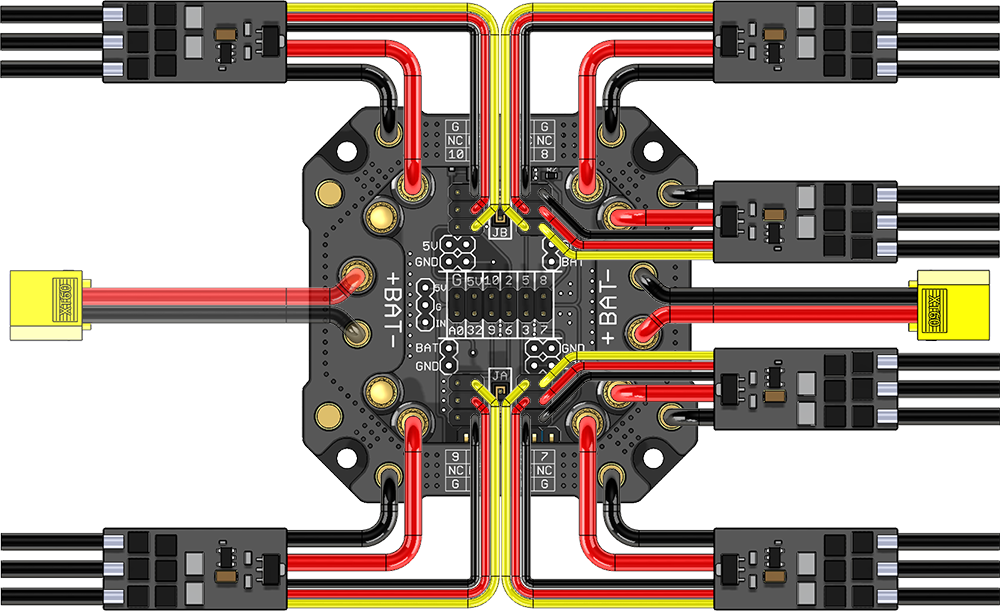
Wiring
Here are some of the standard wiring options although, there are much more on the Lynxmotion MES - Power Distribution Board (PDB) wiki.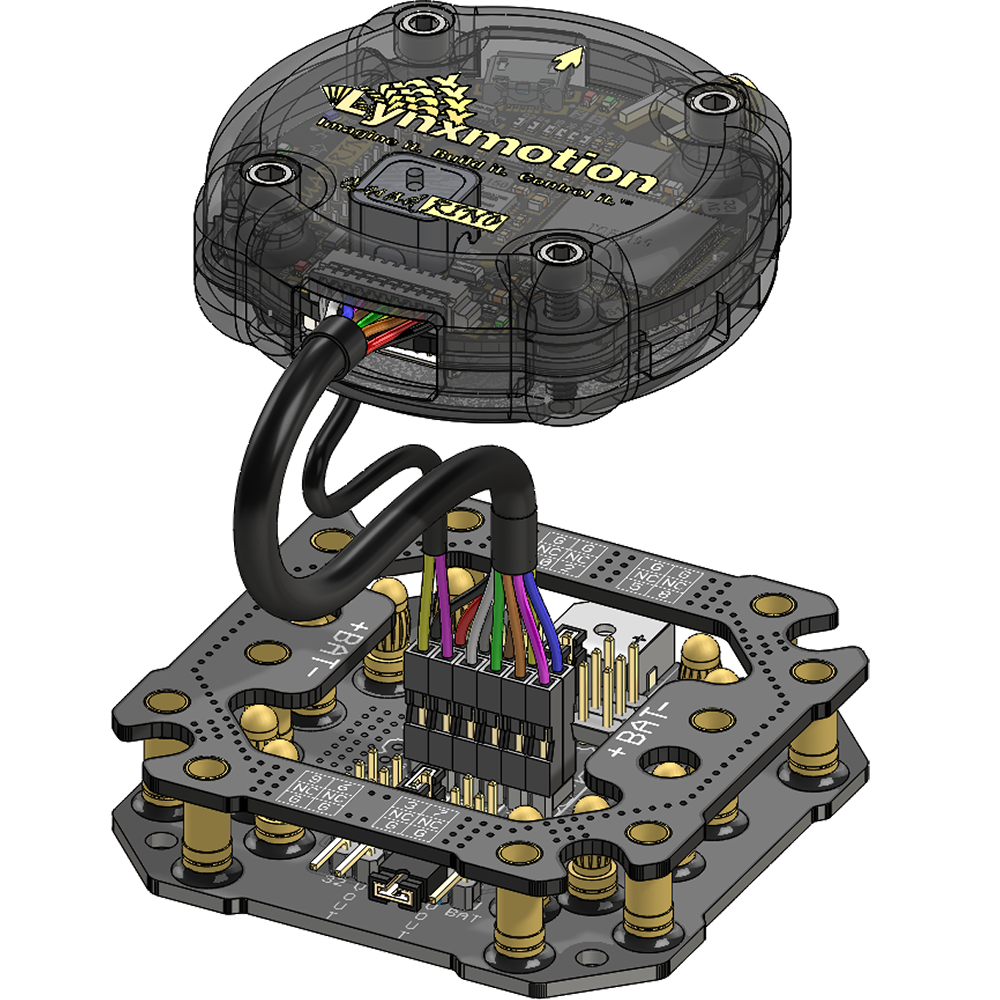 |
| Lynxmotion Quadrino Nano to MES-PDB Wiring |
 |
 |
 |
 |
| single ESC | Quadcopter (4) | Hexacopter (6) | Octocopter (8) |
Thanks for helping to keep our community civil!
Notify staff privately
You flagged this as spam. Undo flag.Flag Post
It's Spam
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
Report Reason
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
You flagged this as spam. Undo flag.Flag Post
✅ Your Post Has Been Submitted Successfully!
Your post is currently under review by our moderation team. The review process usually takes up to 48 business hours.
You can track your post's status in the "My Content" section of your profile. Once approved, it will be published and visible to others.

Thank you for contributing to our community!