

How to Choose a Lynxmotion Robotic Arm


 Lynxmotion Robotic Arms & Grippers
Lynxmotion Robotic Arms & GrippersAs you may already know, RobotShop offers all Lynxmotion robotic arms & grippers on our online catalog, which are based on the modular servo erector set. So, while you may already have decided that you would like to use a Lynxmotion robotic arm, you may not be sure which kit would best fit your project. This article intends to help you choose the right Lynxmotion robotic arm for your needs.
What do you need for a functioning robotic arm?
A fully functional robotic arm requires many different components in order to operate. First, from a mechanical point of view, you need a base, gripper, brackets, bearings, washers, screws, nuts and bolts to hold the entire arm together. These parts will also allow for motion to be possible with low friction while keeping all the parts in place. This is what we call the "hardware" part of the kit. The second part involves the servo motors; these are required to provide controlled motion of the robotic arm. The third part consists of the electronics which usually include the servo motor controller that will be providing control signals and power to each servo motor, as well as the power supply, cabling and switches required to operate the robotic arm. With those three parts covered you can build a fully functional robotic arm. But, you may want something more: software. In some cases, users will only need a fully functional arm kit (hardware + motors + electronics) and will then go on to develop their own software to calibrate and control the arm. But, there are other cases where ready-to-use software is desired, usually because the user does not want / cannot make one on their own. Some of our kits come bundled with various software programs to help simplify using the robotic arms.
Three Robot Arm Sizes
 AL5A - AL5B - AL5D
AL5A - AL5B - AL5DThe Lynxmotion robotic arms share many common components, but there are some key differences. The main physical difference between all of the kits is the size of the brackets between the shoulder and elbow, as well as the length of the tube forming the connection between the elbow and wrist. Lynxmotion robotic arms come in three different sizes, noted as AL5A, AL5B and AL5D in order of increasing size (AL5C having been discontinued). Refer to the table below for the various lengths of each type:
| Type | Shoulder to elbow | Elbow to wrist | Height (reaching up) | Median Reach* |
| AL5A | 3.75" (9.53 cm) | 4.25" (10.80 cm) | 14.00" (35.56 cm) | 5.75" (14.61 cm) |
| AL5B | 4.75" (12.07 cm) | 5.00" (12.70 cm) | 15.75" (40.01 cm) | 7.50" (19.05 cm) |
| AL5D | 5.75" (14.61 cm) | 7.375" (18.73 cm) | 19.00" (48.26 cm) | 10.25" (26.04 cm) |
* Median reach is the length between the gripper and the shoulder at 45 degrees to the base, and elbow at 90 degrees.
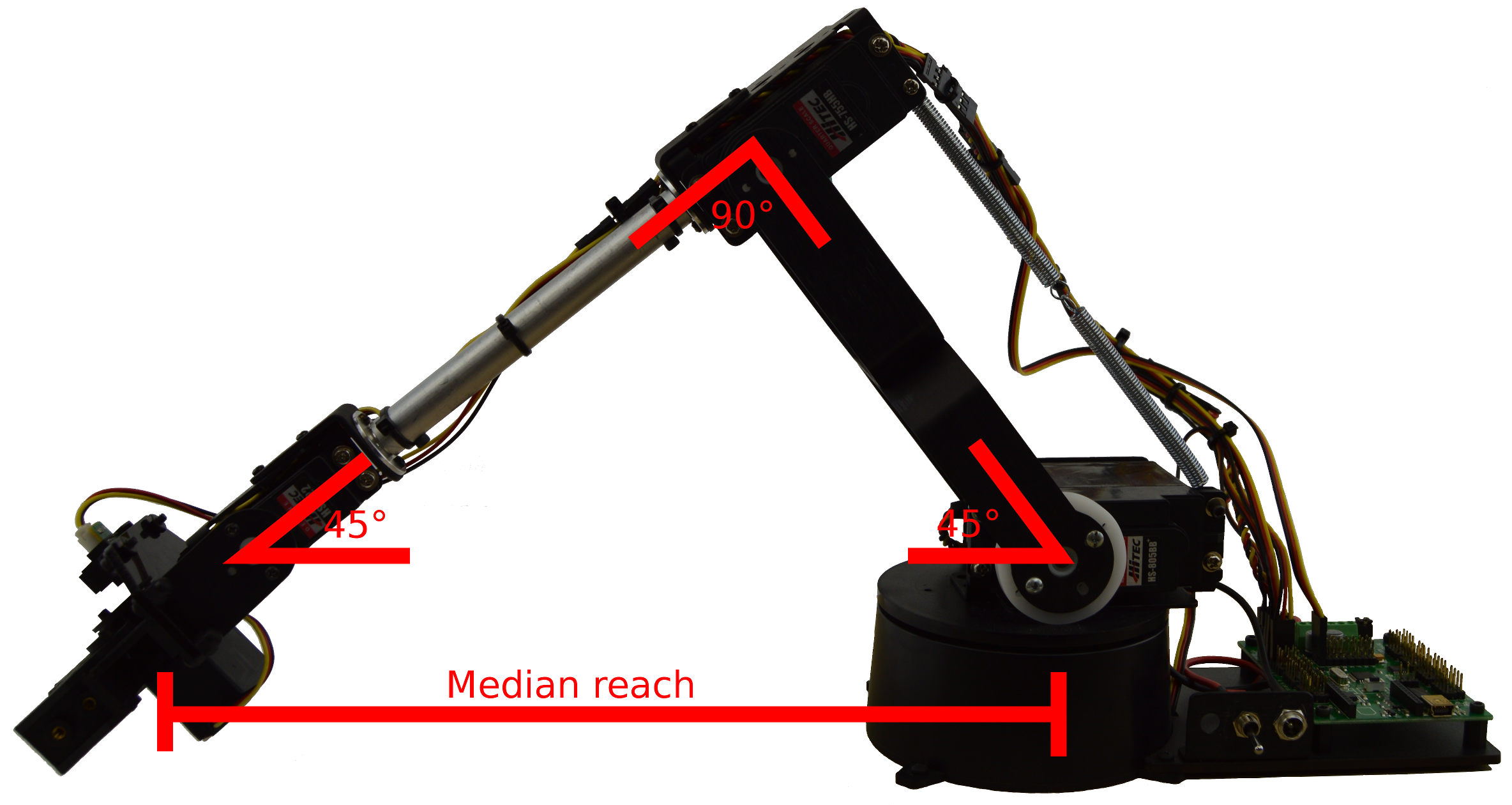 AL5D - Median Reach Example
AL5D - Median Reach ExampleTwo Controllers
The Lynxmotion robotic arm kits can be bundled with one of two controllers: the Lynxmotion BotBoarduino or the Lynxmotion SSC-32U.
BotBoarduino
 BotBoarduino
BotBoarduinoThe Lynxmotion BotBoarduino is a modified Arduino board (based on the Arduino Duemilanove w/ATmega328) which allows easy connection of three-pin R/C servo motors with extra pins for analog inputs, and separate power connections (VS & GND) for the servo motors. Since this board is Arduino compatible (it can use Arduino shields, too!), it allows use of the robotic arm while giving the flexibility to add more features through Arduino sketches or C/C++. This board is particularly useful if you want your robotic arm to be autonomous (not connected to a computer) without having to add extra logic circuits to control it, or for use with a Lynxmotion PS2 wireless remote control.
BotBoarduino Software
If you opted for a BotBoarduino version of your kit then you will have to use Arduino sketches or C/C++ to control your robotic arm. On the Lynxmotion GitHub, you can find some basic examples for robotic arm control, a copy of the PS2X library and a example diagnostic for the BotBoarduino.
SSC-32U
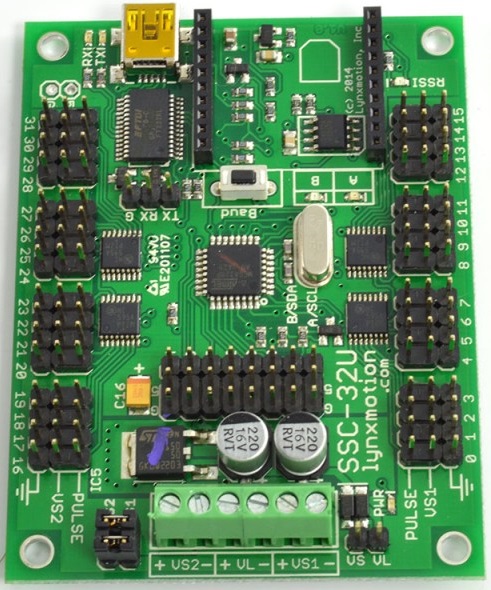 SSC-32U
SSC-32UThe other controller is the Lynxmotion SSC-32U servo controller. This is a dedicated servo motor controller with 32 channels. This board includes connectors for USB, XBee and TTL UART serial connections. RobotShop also sells a version of the SSC-32U bundled with a Bluetooth XBee module. This device allows the individual control of each servo motor and can also perform group movements or restrict movements by time or speed. The board is controlled by sending commands formatted in ASCII strings using one of the methods mentioned above (USB, XBee, TTL UART). This board is a particularly good choice when you want your robotic arm to be controlled by an external logic circuit or with a PC.
SSC-32U Software
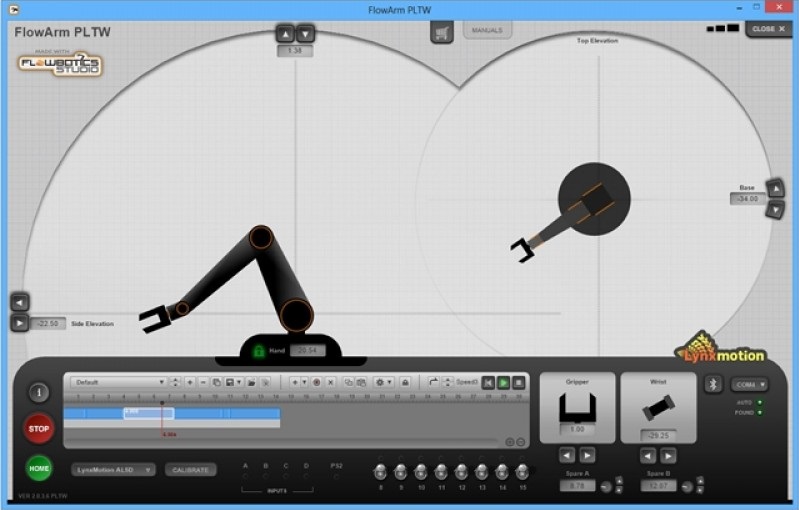 FlowArm PLTW
FlowArm PLTWRobotShop offers several software solutions to control your Lynxmotion robotic arm. Here is a list of the main ones you may want to use for your project if you use a SSC-32U controller:
- FlowArm
- This software is a graphical interface to control the Lynxmotion robotic arms. It allows you to directly control the robotic arm with your mouse and to create patterns that can be saved & replayed.
- FlowBotics Studio
- This software is a full graphical programming environment. It allows you to go further than FlowArm and add more customization to your robotic projects. This is the software that was used to create the FlowArm software mentioned above. You can read more about FlowBotics Studio here.
- SSC-32 Servo Sequencer Utility
- This is a free interface for the SSC-32U controller. Like FlowArm, it was also made using FlowBotics Studio. This software allows you to control up to 32 servo motors and create sequences for them. But, unlike FlowArm, it is not made for any specific robotic kit but more as a way to quickly test your SSC-32U and your servo motor setup.
Five degrees of freedom?
 Wrist Rotate Upgrade (Light)
Wrist Rotate Upgrade (Light)The Lynxmotion robotic arms can also be modified to obtain five degrees of freedom (5 DoF). This is achieved by adding a wrist rotation module to the robotic arm. There are three upgrades available:
- Lynxmotion Wrist Rotate Upgrade (Light Weight): RB-Lyn-273
- Lynxmotion Wrist Rotate Upgrade (Medium Duty): RB-Lyn-453
- Lynxmotion Wrist Rotate Upgrade (Heavy Duty): RB-Lyn-272
Other modifications
Here are a few more modifications that you may want to consider for your project:
- Lynxmotion Little Grip + Sharp Upgrade Kit LGSA-KT: RB-Lyn-862
- Lynxmotion FSR-01 Force Sensing Resistor Kit: RB-Lyn-624
- Lynxmotion Vacuum Gripper Kit: RB-Lyn-339
- Lynxmotion Vacuum Gripper Kit w/ Wrist Rotate: RB-Lyn-356
- Lynxmotion A Style Gripper Kit: RB-Lyn-761
- Lynxmotion A Style Gripper Kit w/ Servo: RB-Lyn-346
All the kits!
Now that you know more about the Lynxmotion robotic arm kits, here is a table containing all the kits available. You can use it to quickly find the kit that matches your needs! Please note that kits bundled with software always include the SSC-32U as the electronics.
| Type | Hardware only | Servo motors | Electronics (SSC-32U) |
Electronics (BotBoarduino) |
Software (FlowBotics Studio) |
| AL5A | RB-Lyn-267 (AL5A-NS) |
RB-Lyn-288 (AL5A-NE) |
RB-Lyn-838 (AL5ACN-KT-32U) |
RB-Lyn-482 (AL5ACU-KT) |
RB-Lyn-841 (AL5AF-KT-32U) |
| AL5B | RB-Lyn-268 (AL5B-NS) |
RB-Lyn-289 (AL5B-NE) |
RB-Lyn-839 (AL5BCN-KT-32U) |
RB-Lyn-483 (AL5BCU-KT) |
RB-Lyn-842 (AL5BF-KT-32U) |
| AL5D | RB-Lyn-270 (AL5D-NS) |
RB-Lyn-291 (AL5D-NE) |
RB-Lyn-840 (AL5DCN-KT-32U) |
RB-Lyn-484 (AL5DCU-KT) |
RB-Lyn-843 (AL5DF-KT-32U) |
There is one more kit which is not included in the table above, the Lynxmotion AL5D PLTW version, which is available both as a kit (RB-Lyn-814) and assembled (RB-Lyn-958). This is a special Lynxmotion robotic arm kit specifically designed for Project Lead The Way (PLTW). It includes a Lynxmotion AL5D robotic arm with a medium wrist rotate upgrade and the FlowArm software.
Thanks for helping to keep our community civil!
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
You flagged this as spam. Undo flag.Flag Post
Your post is currently under review by our moderation team. The review process usually takes up to 48 business hours.
You can track your post's status in the "My Content" section of your profile. Once approved, it will be published and visible to others.

Thank you for contributing to our community!