

A Brief Introduction to Time-of-Flight Sensing: Part 1 – The Basics


WHAT ARE PHOTONS?
Photons are the elementary particles that make up light. They come in different wavelengths, from long-wavelength radio waves that bring you your favorite music, to short wavelength, high-energy X-rays that doctors use to see through your body. ToF sensors use wavelengths somewhere in the middle of the electromagnetic spectrum, close to visible light.
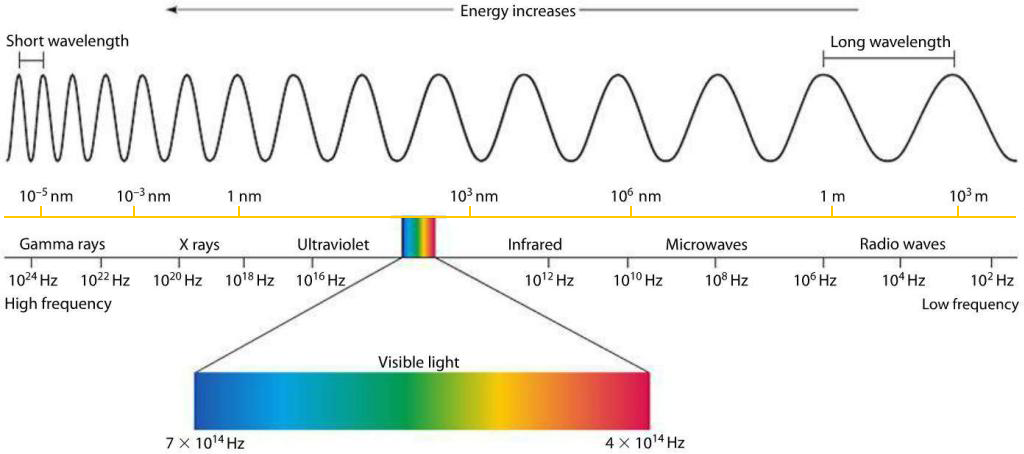
There are three critical attributes of photons that we need to remember for ToF: Photons carry energy; they travel at a constant speed, usually the speed of light; they rarely travel alone.
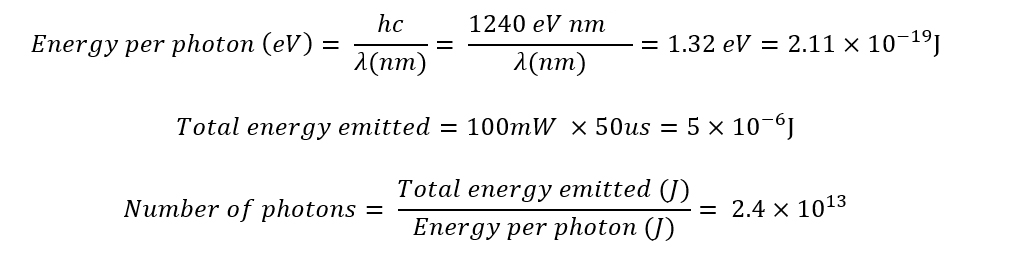
The number of photons emitted by ToF sensors is enormous. We can estimate the number of photons used by a ToF sensor in one measurement using our measurement parameters. If we use a TeraRanger Evo sensor that emits photons at 940 nm, 100 mW for 50 μs, we can work out the number of photons emitted in one measurement:
HOW DO WE CALCULATE DISTANCES FROM TIME?
So, we know photons travel at the speed of light, which is often abbreviated to ‘c’. The speed of light is incredibly fast, 300000km/s. In fact, it is impossible to travel any faster. This means that it takes photons a very short amount of time to travel vast distances. For example, to travel from the sun to the earth takes a photon just eight minutes, while from the moon to the earth takes 1.28 seconds! For an idea of how long it takes to travel more earthly distances, it takes a photon just 33 ns to travel 10 m, and 1 m takes 3.3 ns. As a general rule of thumb, photons travel at 30 cm/ns.
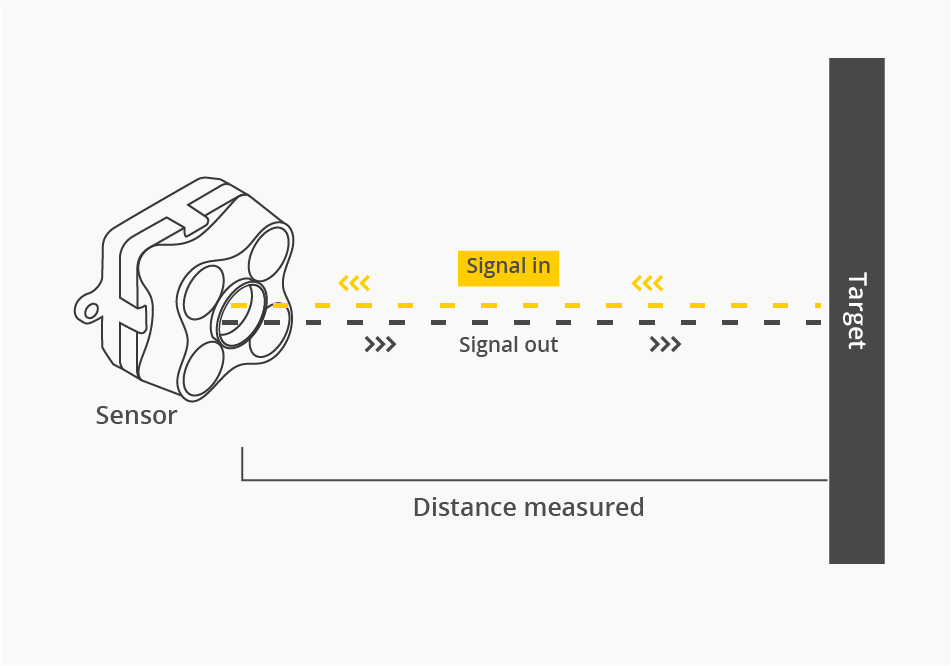
Time-of-Flight literally refers to how long it takes photons to move between two points. So, when we use ToF to measure distances we multiply the speed of light by the time taken for photons to travel from the source to the object and back again, then we divide by two (because the photons travel the distance twice, once on the way to the object and once on the way back):
Distance travelled = Speed of light × Time
It all sounds very simple in theory. Still, in practice, there are some complicating issues, usually related to the target or object that the light hits, or the environment the sensor and the object are in.
HOW THE OBJECT YOU ARE DETECTING AFFECTS YOUR TOF MEASUREMENTS
The object that the photons hit inevitably has its own characteristics, and all surfaces reflect light differently. When light hits a surface, it can be absorbed, reflected or transmitted. The proportion of light reflected by the surface is called its reflectance. However, the reflectance doesn’t only depend on the surface, but also the type of light being reflected. Be careful: Do not assume the reflectivity of a surface is the same for visible and near-infrared light!4
When a surface reflects light, it can also be reflected in a variety of different ways (see Figure 3).

Irregular surfaces can cause significant complications for ToF measurements, as it can be difficult for the sensor to understand which photons came from where. In confined spaces, photons can also bounce off walls and other objects, further confusing the measured distance.

HOW THE ENVIRONMENT AFFECTS YOUR TOF MEASUREMENTS
ToF sensors are sensitive to ambient light, as they can’t tell if photons were emitted by the sensor or have arrived from other light sources. ToF sensors tend to work better indoors, where there is little or no ambient light. Outdoors light from the sun travels through the atmosphere at different angles, interacting with dust and vapor as it goes. As a result, outdoor ToF sensors encounter a characteristic spectrum of light (see Figure 5) with gaps in the light spectrum at energies where water vapor, oxygen, and CO2 absorb light. In theory, these gaps in the solar spectrum are ideal wavelengths for ToF sensors to operate, as there is less interference from ambient light.

In the second article of this ‘Introduction to Time of Flight’ series, we will talk about the two varieties of ToF, direct ToF and indirect ToF. Direct ToF uses short pulses of light, and we measure the time until each pulse returns to the sensor to measure the distance to an object. Indirect ToF sensors emit a continuous wave of modulated light, and the phase of the reflected light is used to calculate the distance to the object. Stay tuned for the next part in this series!
REFERENCES AND FURTHER READING
1. ‘Time-of-Flight Cameras: Principles, Methods and Applications’ — M. Hansard, S. Lee, O. Choi, R.P. Horaud, Springer, 2013.
2. ‘Time of Flight Principle’
https://www.terabee.com/time-of-flight-principle/
3. ‘The Nature of Light’ — C. Roychoudhuri, A.F Kracklauer, K. Creath, CRC Press, 2017.
4. ‘Theory of Reflectance and Emittance Spectroscopy’ — B. Hapke, Cambridge University Press, 2012.
Thanks for helping to keep our community civil!
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
You flagged this as spam. Undo flag.Flag Post
Your post is currently under review by our moderation team. The review process usually takes up to 48 business hours.
You can track your post's status in the "My Content" section of your profile. Once approved, it will be published and visible to others.

Thank you for contributing to our community!