


The µBipedino Robot
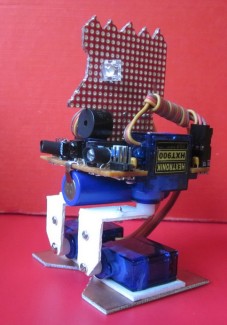
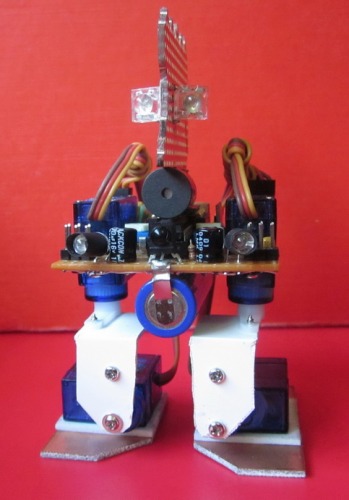
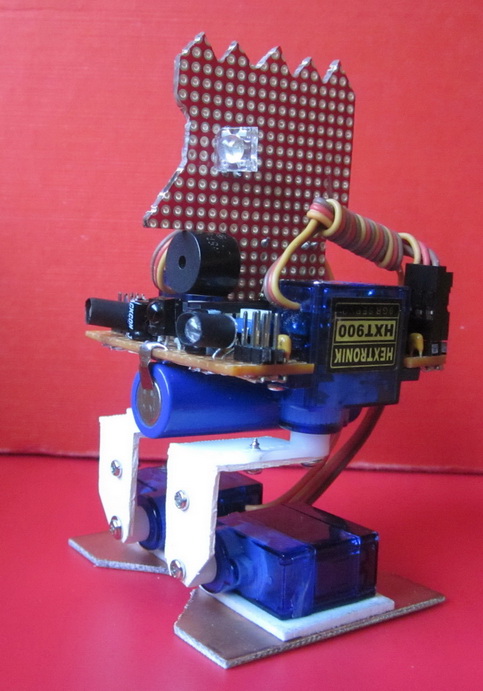
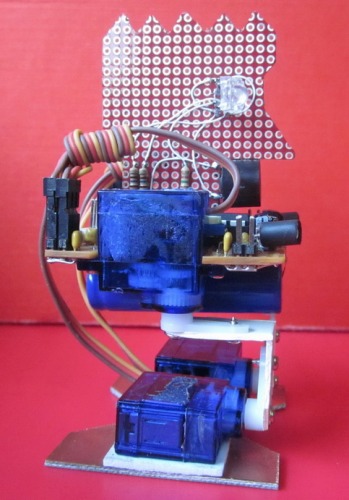
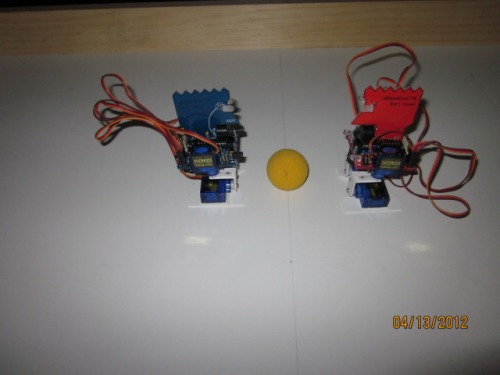
The µBipedino robot is a tiny biped with 2 servos per leg. With a 2x2" custom made main board and another one for the head, this little robot can walk, turn, dance, avoid objects, sing and display a nice color show.
A couple of weeks ago I saw a nice video of kids playing with a tiny biped robot made by Easybotics. I contacted the owner and asked if I could create a similar robot based on an ATmega328 microcontroller that can be programmed in Arduino IDE, either directly in C, or, by using the ArduBlock tool, in a graphical manner, connecting blocks to write the program. He responded quickly saying that he has no problem with that, in fact, we could collaborate to build an Arduino compatible robot. After exchanging design ideas, we decided to go separate ways, as I wanted a simple robot board kit to be assembled by the customer or bought already assembled, and he wanted a more sophisticated board with a built in USB port and SMD parts. I started to prototype a robot and design the main board and today I have it ready for demos.
But first, let me introduce the µBipedino (pronounced micro-Biped-eeno) robot to you:
- micro-biped using 2 servos per leg for walking and dancing
- ATmega328 microcontroller at 3.3V, 8MHz with Arduino bootloader
- runs on a 3.6V LiIon battery
- built in charger with charging status LED (MAX1555)
- high side switch to enable the power to the servos by the microcontroller
- On/Off power switch with power status LED
- dual IR proximity sensor (38kHz) to detect objects on the Left/Right/Center
- trim-pots to adjust the IR LEDs light emitting level
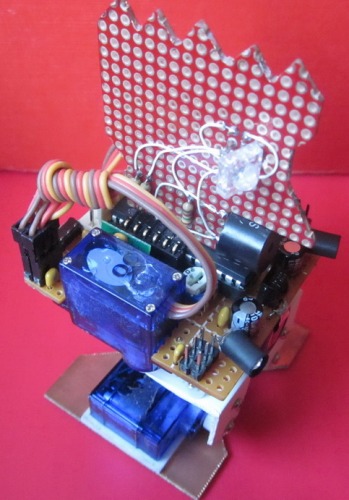
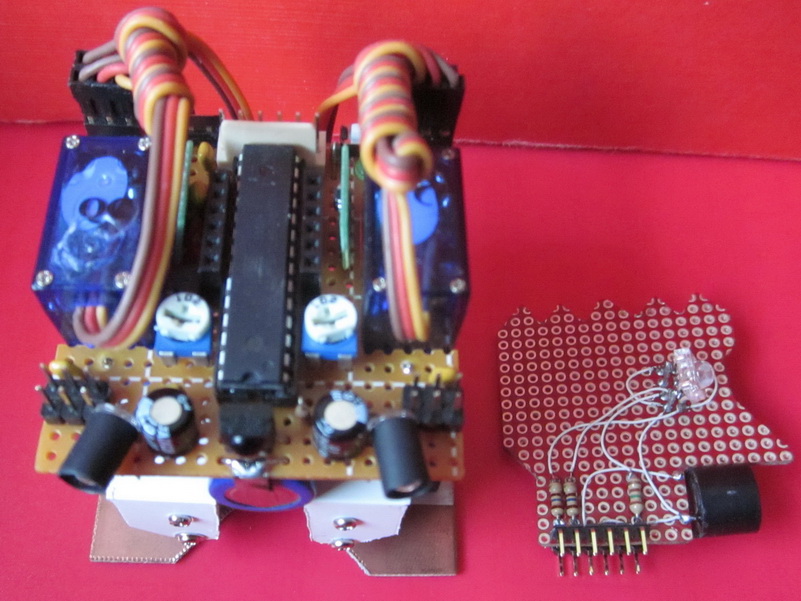
- removable head board with built in Buzzer and dual RGB LEDs
- 4 extra connections for additional servos or sensors
- programmable start/select button
- keyed FTDI cable connector for programming
- board size: 5x5cm (2x2")
- robot size: 6x6x10.5cm (2.5x2.5x4")
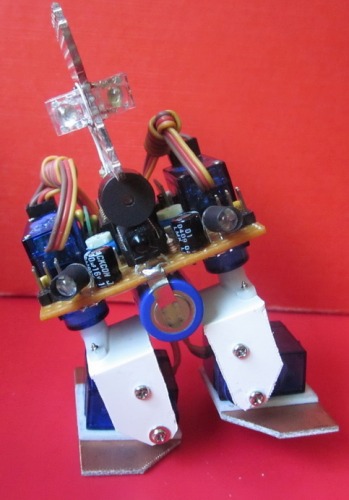
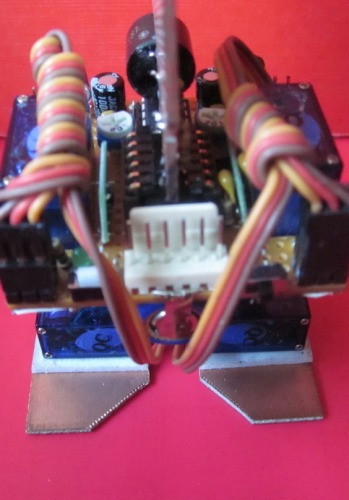
Want to see it? Here are the pictures:


And the schematic and the PCB design:


I expect to have kits in the store sometime mid-January, perhaps even sooner if all works well.
Code has been attached. More improvements will follow, but it may get a head start for people with similar robots.
Update: after more than a year, I still have the robots on my robotics related work desk. I sold a few kits to some people that really wanted to try them out but the rest are still waiting for the plastic braces I was supposed to make on my 3D printer. But the thing is, the 3D printer did not arrive. Not because it was a scam, but because it was a crowd funded project that took a looooong time to get completed. Now, they are about to start shipping them. What is the printer brand? MakiBox. Yeah, that one. The cheapest 3D printer out there that took 2 years to get from idea to shipping with people waiting and waiting... But I digress. I'm glad that people started to build similar robots (BOBs) that work the same way although they use different components. Someday I will update the uBipedino further to give it the finished look that was about to look similar with the BOB's. Until then, I'll add some old pictures with the kits that I built:

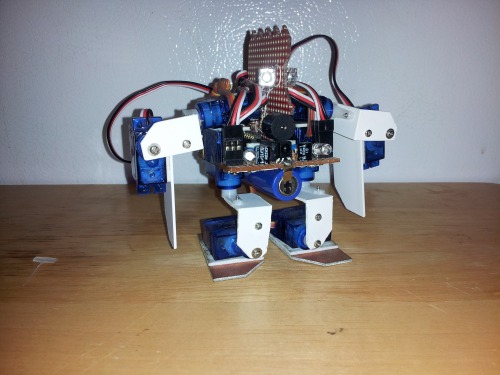
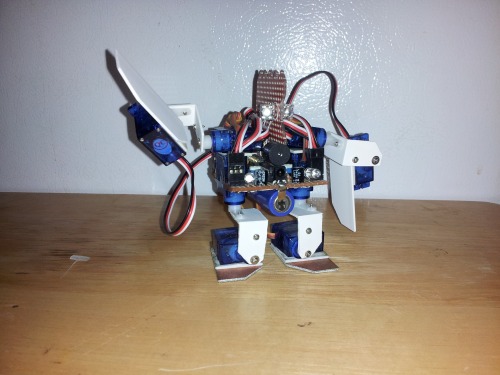
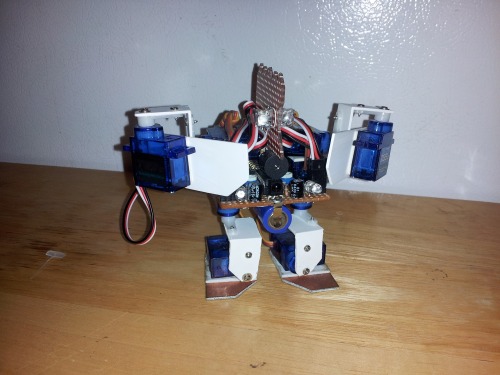
OK, talking with people in the sout box I realized that I have not uploaded pictures of my prototype robot with arms. So, I took it out from the box, blew some dust off of it and took these pictures to spark some ideas:

Walks, Avoids obstacles, Dances, Plays Sumo, Soccer...
- Actuators / output devices: 4 HXT900 servos
- Control method: autonomous or remote controlled
- CPU: ATmega328P(3.3V 8MHz) with Arduino bootloader
- Power source: 3.6V 750mAh Li Ion battery
- Programming language: C
- Sensors / input devices: Dual IR proximity sensors...
- Target environment: indoors