


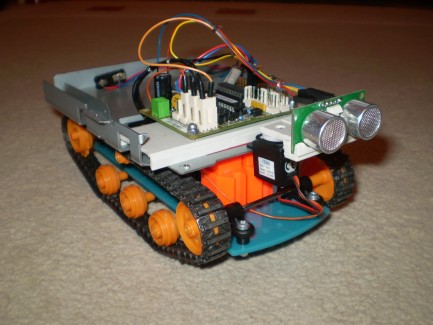
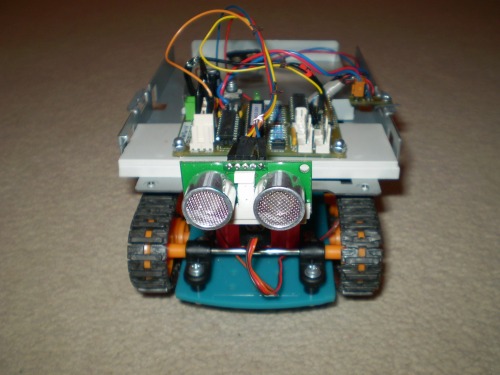
TANKBOT with PICAXE 28X1, SRF05
One day when I accidentally browsed NET settlement, I came across a video in which found a robot with tank chassis, which used to measure the distance ultrasonic sensor and marched to the countryside in a separate room. Due to the fact that in government it is akoráte to the bottom, I decided that instead of solving unnecessary administrative work assigned directly to the workplace will give the construction of this ”robot tank “..... so I started looking for tutorials, schematics and buy some parts.
Necessary components
1) VS-2 - Standard Servo 4.8-6V Power Control pulse width of 1-2ms, repetition interval of 20ms .. Price 196,-CZK
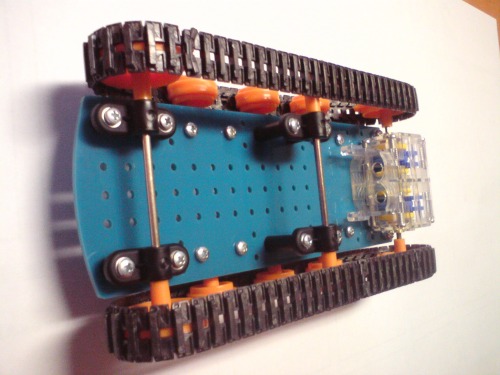
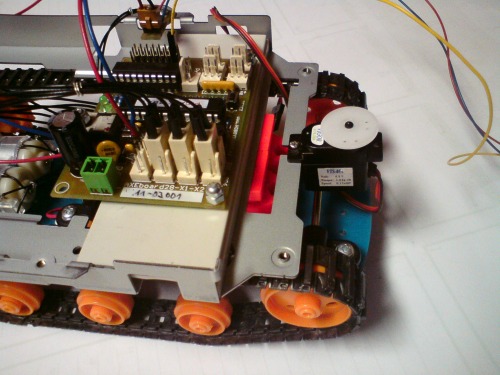
2) TANK-02 - caterpillar chassis, four-speed gearbox TM70168 .. Price 960,-CZK
3) SRF05 - Ultrasonic range finder .. Price 616,-CZK
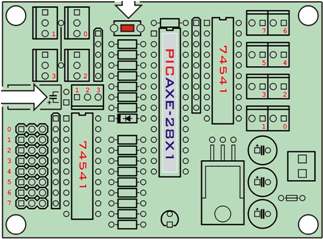
4) PICAXE 28X1 - the brain of the whole project .. price 340,-CZK
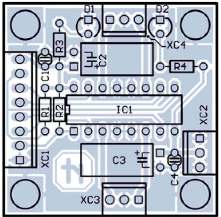
5) AxeBoard28 - the board .. Price 420,-CZK
6) CABAXE025 - cable for programming the board .. price 65,-CZK
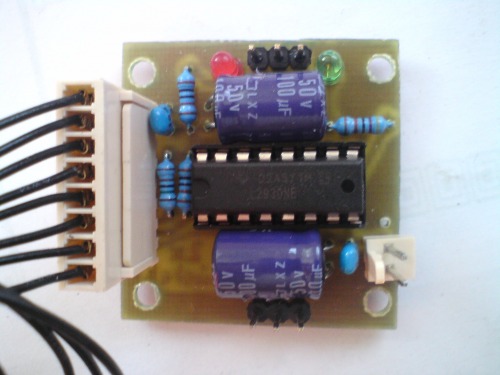
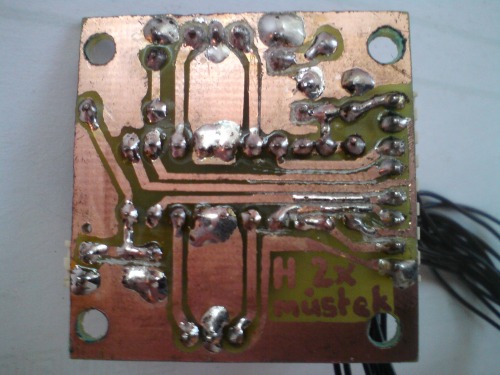
7) BRIDGE20 - dual H-bridge control AC motors .. Self price about 350 CZK
8) good luck, nerves and a few unnecessary parts, you can use in the project.
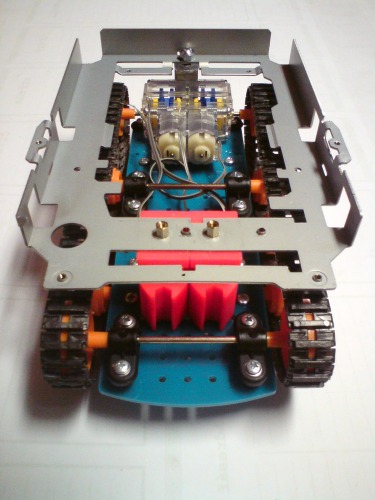
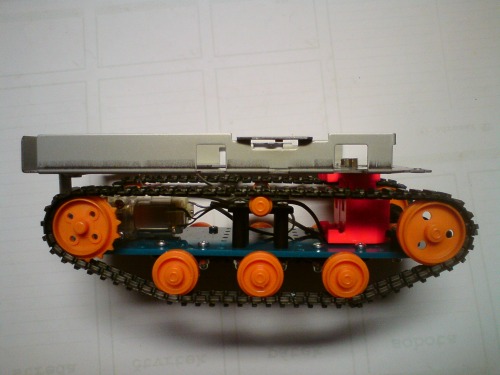
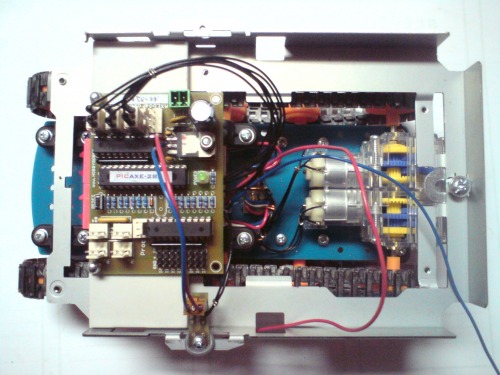
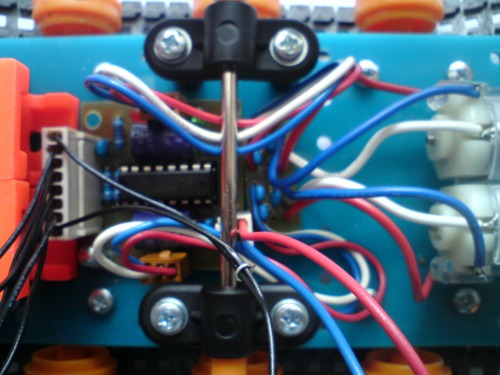
So as you can see it's completely free, so you need to decide whether to go ahead or not. Order bulk items can be http://shop.snailinstruments.com. All of this can be expensive even during experiments. Just as I sometimes choose the method of trial / error and a launch by the ”procák“ from the board. Given that I have never been anything like nestavil and acquisition costs have exceeded a certain threshold, when I could just throw all the trash, I decided on technical advice on this forum ... so once again thanks to Milan (administrator ). Well, because I'm stingy and want to avoid any potential failure, I decided that the instructions to complete the construction will place here with all their details. So if you have purchased or are part of the gain in another way. We start with BRIDGE20 - a double H-bridge for DC motor control with maximum current of 2A for each one that controls direction and speed, with power IC L298D. This you have to make yourself according to this link http://www.rotta.cz/PDF/bridge20.pdf. Power project is a separate battery 6xAA (logic), 1x9V (engines). As the superstructure to the chassis I used the inside of the old CD-ROM drive, which I propped plastic parts of the handles water levels. Free space in the superstructure, I overruled the part of the FDD drive. Development board is placed on a modified plastic canopy shaft case. I got the wiring from nearby scrapyards where I needed dismantled. Since I got my colleagues 'case' on 6AA AAA batteries and I also added some old PC parts to be in the future will use in the construction of other projects. The bridge is trabi dual voltage, one of which must be stabilized +5 V in size, so I created a terminal, where I assemble the stabilizer of this tension and brought a second source I used a 9V battery. Created from the collected terminal voltage of an ultrasonic sensor and servo. The engines must use a stronger lead-in wires (larger current draw) and mainly used suppression capacitors soldered directly to the contacts and the motor frame (see the figure used by the involvement of ceramic capacitors and 4x47n 2x100n). Noise can have a negative impact on the entire facility. The involvement of the whole picture, themes and questions if you write to my e-mail: [email protected]. But we prefer to communicate here on the forum and we will not leave anything for himself. Still, I plan a body, something like a mechanical arm or blade ... we will see in the future. This is a program that controls, not its author, but it works well http://goosb.wz.cz/PICAXE/ultrazvuk-servo-uprava.bas. The program is still regulated, so if I'm going to seem that it is most at our customized design, thus releasing it here.
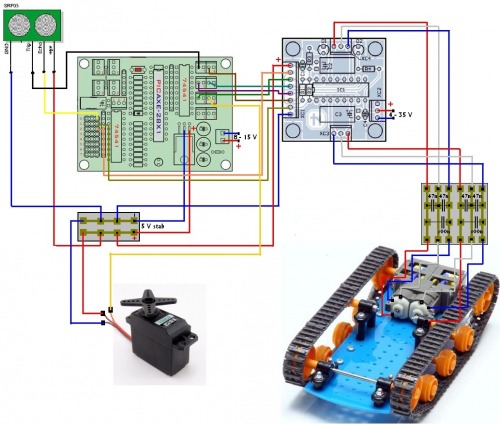
BRIDGE 05 AXEboard-28

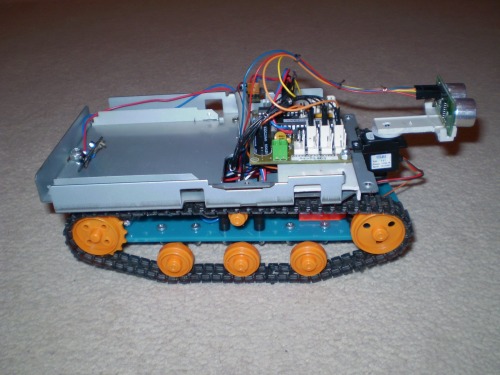

- Actuators / output devices: 2 motors, one servo
- CPU: Picaxe 28x1
- Operating system: Picaxe basic
- Power source: 6xAA for logic, 1x9v for motors
- Programming language: Basic
- Sensors / input devices: SRF05
- Target environment: indoor