



Houston (WIP)
There's a science fiction novel I have, (About a robot of course.) Where a secondary character attempts to use some time management software to schedule a minor task he's about to embark on. When the computer informs him he can do it in (as i recall) eleven years, he gets insistent and demands it sets this task to a higher priority. SO it lists for him all the other high priority tasks that MUST be done first--Repair of structure that's about to collapse, requiring tools that are in unavailable and, parts that have to be made, etc. In the end, he gets so frustrated and angry that he beats his newly adopted robot almost into scrap metal. (Well, there WERE other extenuating circumstances, when the robot counted to eleven. But I digress.)
I know just how he felt.
Houston started back in, October. I think. When I ordered a bunch of stuff from YourDuino, (Before they became the LMR favored supplier.) For the life of me, I can't think of anything from that order that's actually gone into Houston, or will.
And that's been the story of this project. I get an idea, put some money aside for parts. Order the parts and while waiting for that proverbial slow boat, I do some research and testing. By the time the parts arrive, I decide something else would do a better job, or I'll find a better way to accomplish my goals and begin again. And then as I make progress, I get to a point where I can't go forward--Indeed at times I couldn't even start--until I get ahold of something I haven't even ordered yet. And trust me--any time I jumped the gun I ended up starting all over again.
Here's an example.
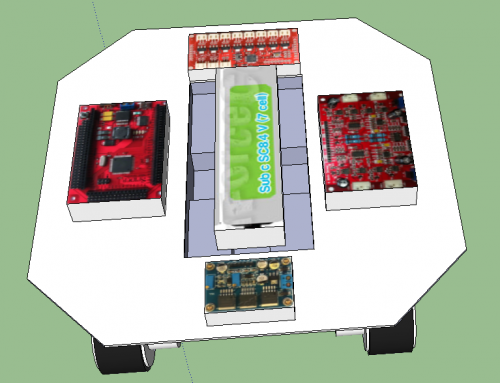
This is a scaled drawing of Houston's base. I made it so I could determine the spacing of parts I had, and other parts I intended to order. Above this deck sits a single board computer all alone on a deck of its own. In the center of this deck is an 8.4v volt battery pack sitting inside a Rover 5. In the foreground is a 4 output DC-DC converter that would have been the perfect power supply had I bothered to think for a minute, calculate a little ohm's law, and determine that a computer, Rover 5 and a dozen or so servos are going to need considerably more than a 15w power supply.
Also, do you see a hard drive anywhere? No it's not on the (unseen) upper deck. The only thing there is the SBC. My Houston blog has more details.
Here's how it turned out when it came time to put things together.
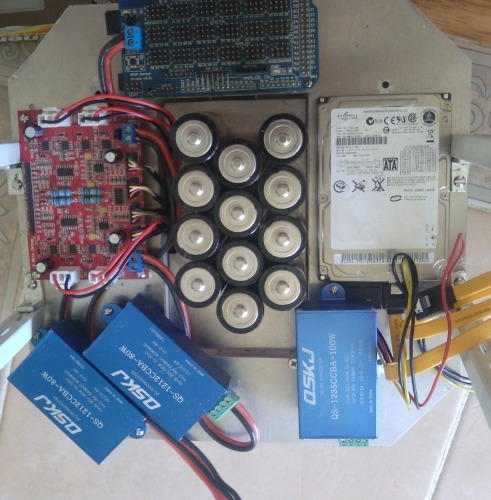
The 3 blue boxy things are three DC to DC converters that act as (from left to right) a 5 volt power supply, primarily for the servos. A 7.2v supply for the Rover 5's motors, and an 18v supply (I thought it would be 12v like all the OTHER SBC's I'd ever bought.) for the computer. The batteries in the middle were for sizing of a 14.4v 5a battery pack I'm currently assembling out of individual nimh c cells. (Another tale of woe I'll get to in a future post. Me and my bright ideas.)
I ended up using an Arduino 2650, that I already had, instead of the Redback Spider controller I would have had to wait (and pay) for. Sorry Oddbot.
I also managed to squeeze in the notebook sized hard drive I forgot, but you may notice the red board in the background isn't on the deck any more. (Challenge--What is it? I've never mentioned it or what it actually does) I might still use it, but if I do, it will have to be mounted higher up somewhere. Probably a good idea to keep it out of the way.
There IS a minor improvement visible. I took the center section that I cut out, cut a slot on one edge for the motor wires and. . .well, as cool as Rover 5's are, their insides tend to be a scary mess of wires. Except for mine.
Anyway, I have this thing about posting too early, and having dead projects staring at me from my monitor. But then, I realized that I HAVE seen a number of projects here than started out with a drawing. And I've watched ChrisTheCarpenter bulid, and then REBUILD his magnificent CNC machine--chronicling all his mistakes, literally over the course of days. (Never mind how intimidating that time frame was. heh.)
I've got lots more to talk about. Building a battery pack. Figuring out what the hell you actually DO with an Xtion Live Pro, servos and heavy arms, juggling Arduino pins, resource hungry motor driver boards and too many servos, and. . .
Well. . .it will be there. With pictures and everything. Maybe even some video. Trust me.
Oh by the way, did I mention I'm realizing a life long dream and having a ball?
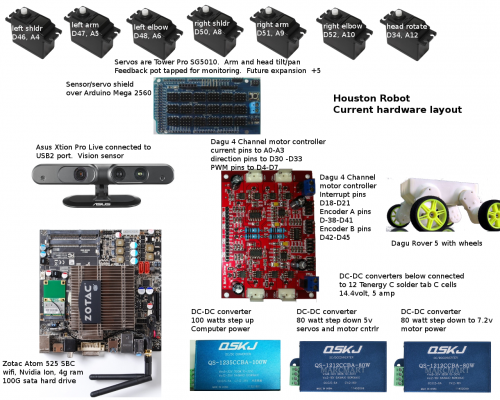
EDIT 3/16/12 I put together a visual chart of Houston's hardware configuration. Comments welcome.
Now? Get's in the way
- Actuators / output devices: 8 servos, Rover 5 base
- Control method: undefined
- CPU: Dual Core Intel Atom 525 1.8 GHz Mini-ITX
- Operating system: myrobotlab, ROS, Ubuntu 11.10
- Power source: 14.4V NiMH rechargeable
- Programming language: Python, Arduino ide, Processing
- Sensors / input devices: Feedback pots on servos. Drive motor current sensing. Quadrature encoders, Xtion Pro Live.
- Target environment: Indoors. If my wife has her say--Limited to my workroom