


Crusher - The Wheeled Tracker Robot
Components
- DEMOQE Development board
- L293D Motor Driver
- 2 DC Motors
- 2 Wheels
- Round Chassis
- Ball Caster
- Sharp Infrared Sensor GP2Y0A21YK
- CMU Camera Module
- Bluetooth Module
- PC with internet connection
- Aerial Camera
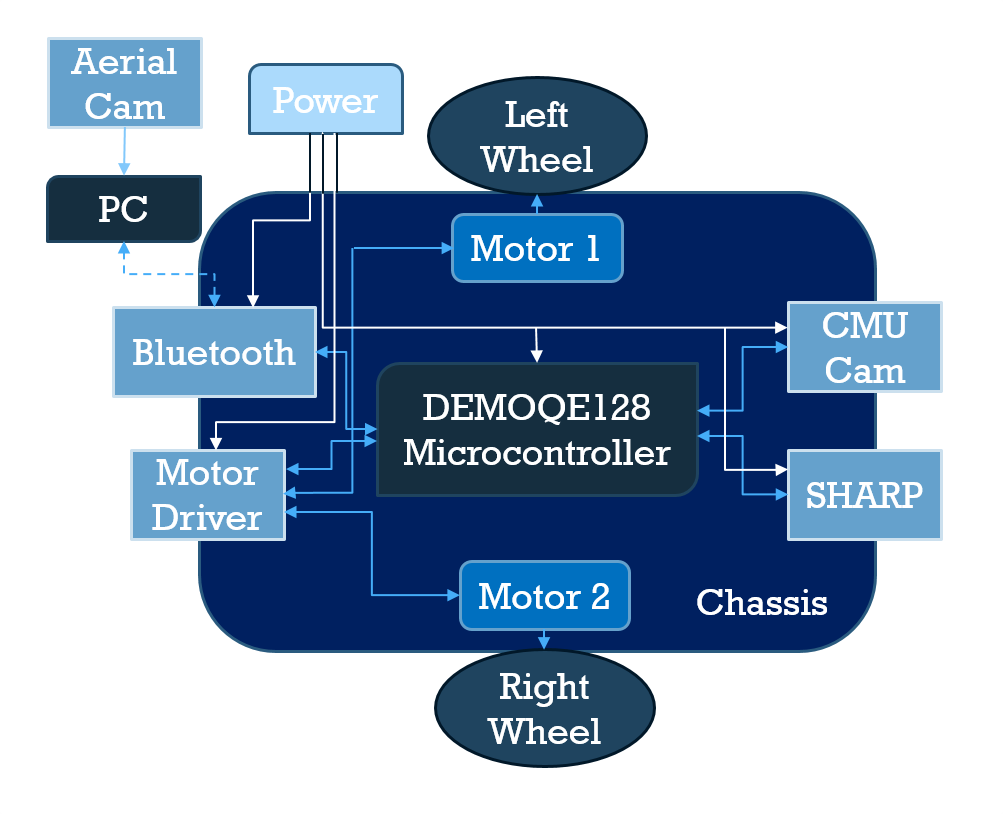
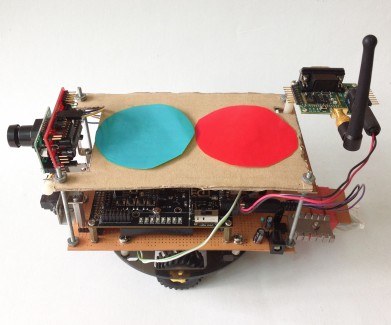
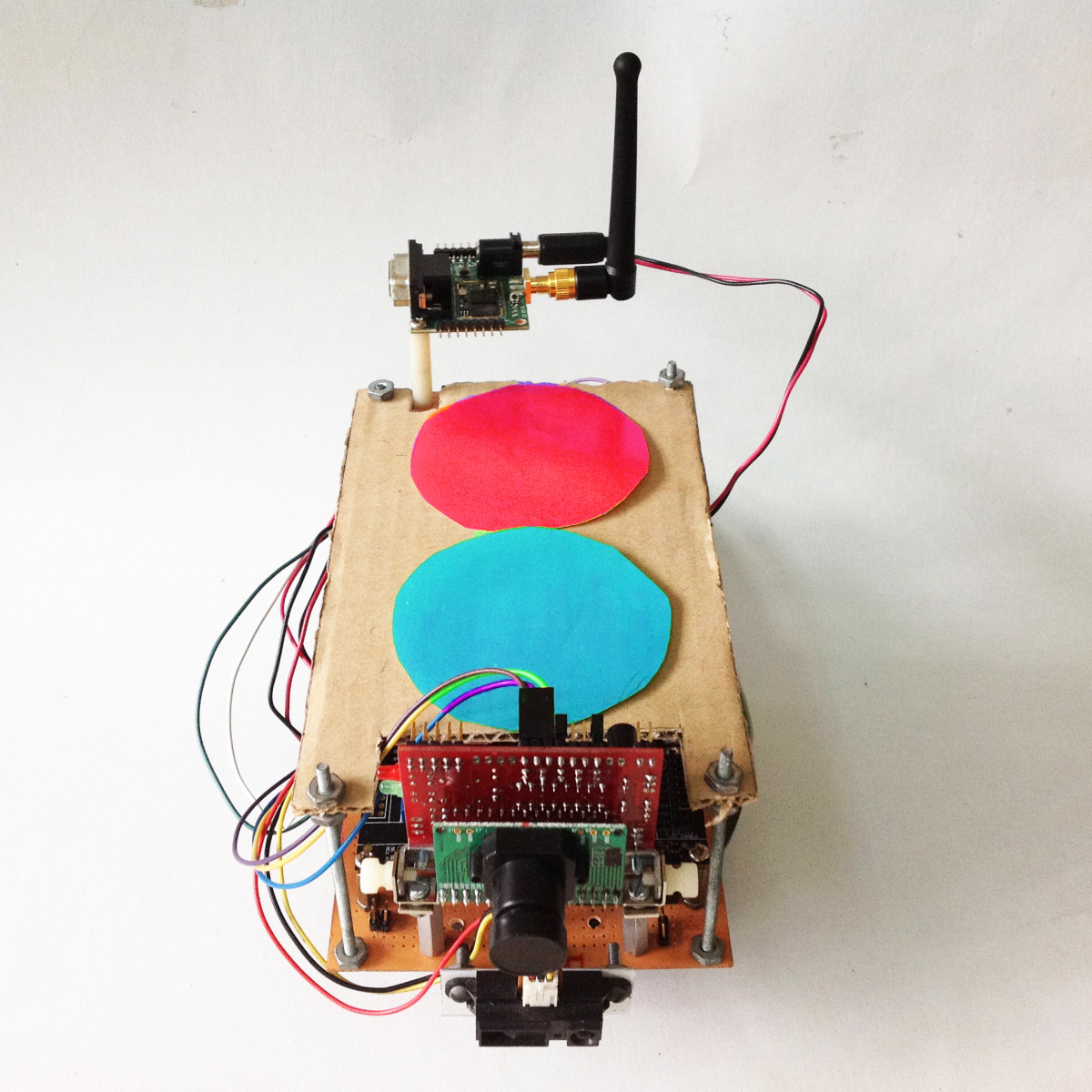
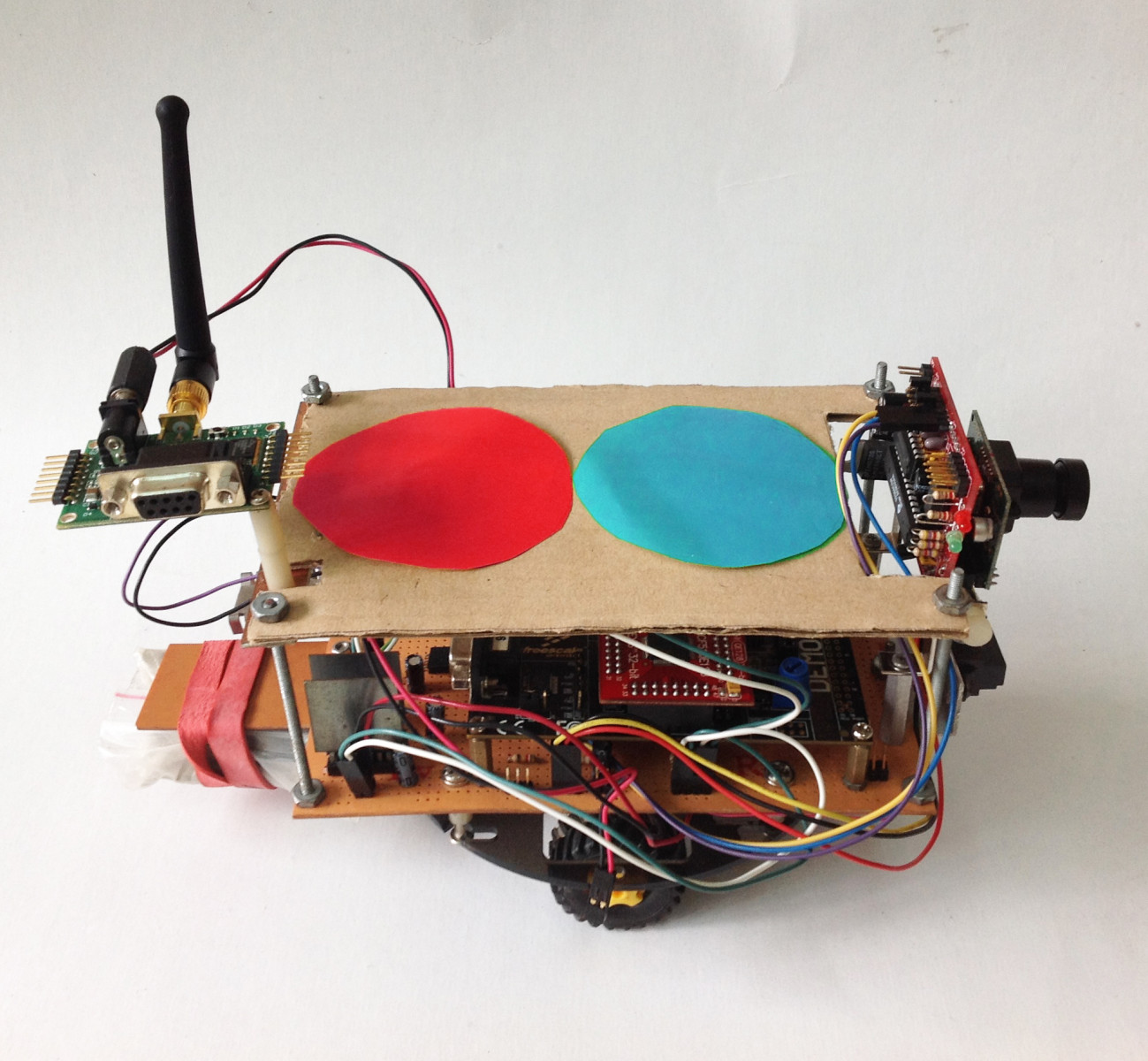
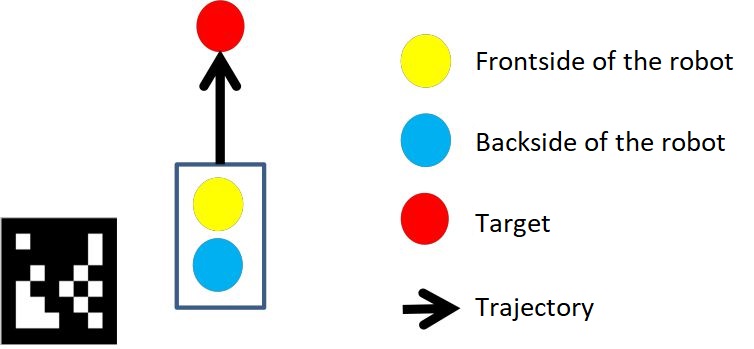
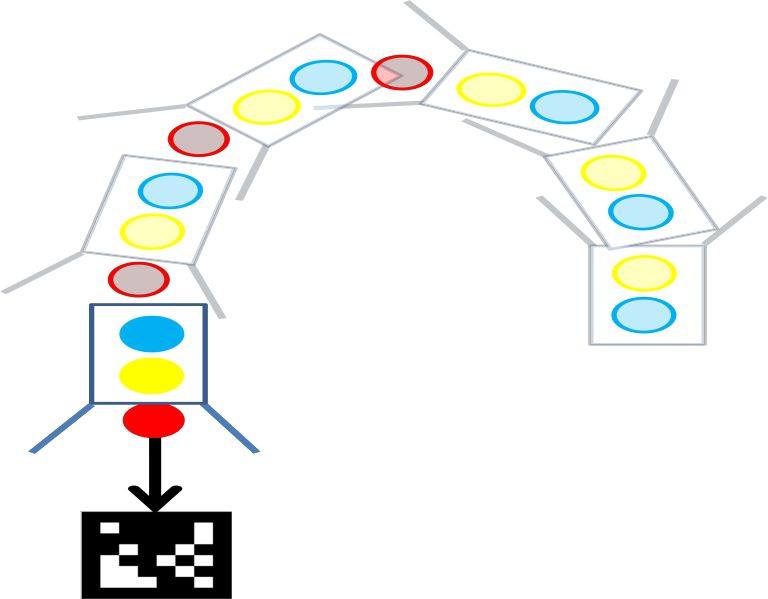
This was a project I did some time ago as an assignment at my university, my team called him Crusher but he was actually a very peaceful robot. It consisted of a mobile robot that used two DC motors connected to two side wheels to move and a rear ball wheel as support. It used a microcontroller to process the data acquired by the onboard sensors, these were a front camera to detect objects and their color, an infrared sensor to determine the distance to objects in the field and a Bluetooth module for wireless communication with a PC. The PC used the information from a private web server that listed the position of the colored balls using a Python script which used the information acquired by the aerial camera and corrected the perspective using an AR marker to give the coordinates, size, and color of the balls, this allowed the robot to know the location and color of the targets present on the field.
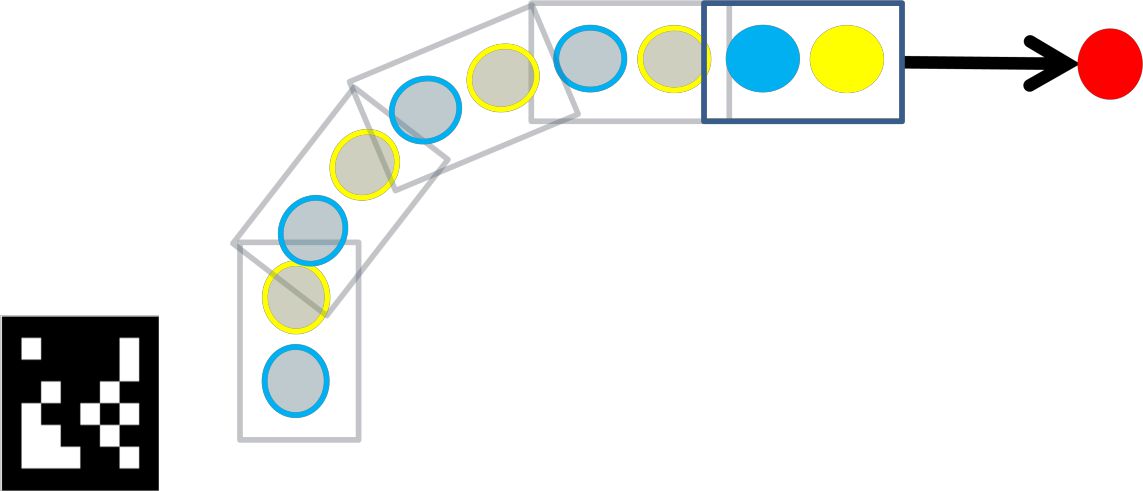
In order to reach the targets, the robot used a control system that traced a trajectory using the position data of the balls and his own location. When approaching the position of the target, it determined the distance to travel with the data from the infrared sensor and the front camera. With this set of information, the rotation and speed control logic were carried out to transport the ball towards the goal at the corner of the field (where the AR marker was located).
Video Demonstration
Project Repositories