

John Deere walking tractor II
youtube.com/watch?v=DwR3O7JSfWA&feature=related
Hi Kurt,
I’m happy to see that you’re making progress on the rover again. I am a bit confused about your pictures though. If I compare the arm on your picture with my AL5D it looks a bit smaller. Maybe It’s just something optical since your base is bigger then mine. Check this picture to compare.
http://forums.trossenrobotics.com/gallery/files/2/0/3/7/p1030227.jpg http://forums.trossenrobotics.com/gallery/files/2/0/3/7/p1030228.jpg
{kind=link}
{kind=link}
I’ve got the Idea that the tube you’re using is smaller then the original AL5D arm tube thingy… 
My gripper is hanging just over the base at a 45 deg angle. I’ll make a close up when I come home.
Xan
Nice ROBOT mag to 
Hi Xan, I guess the real question is how long is the tubing piece supposed to be.
Originally mine was 2.25 inches long as that is what was mentioned in Step 8 of the assembly guide and I ordered my arm in pieces. The ones from my old legs are 3.0 inches long and looks better with it.
Kurt
I’m at work at the moment so I can’t verify it at the moment. But the latest version I send you on the mail has got the correct joint to joint values. If they are correct, you have got the correct tube. 
Xan
I always get a bit confused with these medical terms…
When you define HumerusLength you are defining the length between the shoulder and the elbow? Would you measure this from center of servo to center of servo? which would be from locknut to locknut? If so mine is something like 3.75 inches or about 95mm.
Then if we are talking UlnaLength does that translate to the length between the elbow joint and the wrist? if it is again from one pivit point to the other here, mine is now about 6" with the 3" tubing, which comes out to about 152.
The definitions for these two are defined for the 5D as
HumerusLength=147 (5.78 inches) and UlnaLength=187 (7.36 inches).
I noticed these appear to match what is in the RIOS configuration file.
How does the hand length influence this. You added the light weight gripper rotate which add 1.25 inches and have the heavy duty one that add .5 inches.
Thanks
Kurt
One picture can say more then a thousend words…
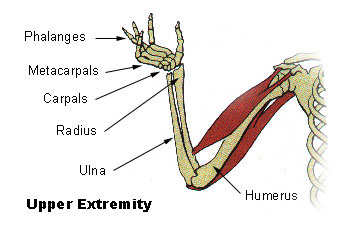
All Lengths are measured from joint to joint (servo axis).
LOL, I didn’t check that but I’m happy to hear that my values are the same as the values in RIOS.
The center of the base is the 0 point for X and Z (left and right). The bottom of the base is the 0 point for Y. The IK solution calculates all angles according from the 0 position to the position of the wrist joint. So the gripper isn’t included in the IK solution. The length of the gripper doesn’t infect the IK. I tried this but it was to hard to control with the remote.
I hope this helps!
Xan
The tubing on the AL5D is supposed to be 4.5" long. I just checked the assembly guide and it’s wrong. We are fixing this and checking the rest.  sorry for the trouble.
sorry for the trouble.
Fixed the assembly guide, though I’m sure it wasn’t my fault. Not my fault at all… website gremlins, I tell you! 

Yep, it looks like I ordered some wrong parts. First the tubing and looking at Xans picture I ordered the wrong large C brackets. I think I have the Large C bracket (ASB-202) and I should have purchased the long large C bracket (ASB-203).
Looks like time for another order.
Kurt
Heh, with the mega powerful servos and the shorter segment lengths that’d be a pretty strong arm there. 
Yep that is for sure 
But I ordered the updated parts anyway…
Kurt
Nice hat Kurte!
Well the parts arrived and yep the arm is much bigger now. It helps to have the longer C brackets so it can fully clear the mega servos. Also the longer tubing works better as well. I also took this time to replace the older style gripper with the newer one (ones with the screws in the back) as well as I used an official gripper attachment plate. I also attached an FSR to the gripper.
I just got everything back in sort-of one piece and tried it out. Took a few servo wire swaps as I screwed up the order… But the current integrated code appears to be working. There are still some tweaking and testing I will do over the next several days.
First step will be to test the servo zero points and adjust.
During this time I will adjust the resting location for the arm as the wrist rotate servo wants to run into the base and or the scanning servo/sensor.
Need to work on the FSR and/or code integration to the gripper. The gripper wants to open but not close. It will close if I press on the fsr button. So I think I may have wired it differently. (I believe I did it the way that is needed for RIOS but I need to verify. Will probably make the code conditional for both configurations.
I want to play more with the limits code to see if it can be made more smooth. There are times when the wrist appears to want to bend for no reason that I can tell, but will investigate.
That is all for now.
Kurt
Hi Kurt,
I’m happy to hear that the new parts fit better.
The FSR needs to be connected as “non-RIOSâ€
I have had some more time to play with the rover and arm. I was having some problem with the wrist servo not acting properly, it would sometimes move and other times not. Then it would go to the bottom. It was never limp. To try to see if it was a software or hardware issue, I put in a Y cable to the servo going to the wrist and plugged in my spare 645MG and tried it out. Short version: I think it was the servo so I swapped it out…
Xan you mentioned about the IR servo not working well when the ARM is moving. I wrote some code yesterday to try it out. It scans from -60 to +60 degrees using HSERVO. Each HSERVO call currently increments (or decrements) by 2 degrees. After the HSERVO completes, I do AtoD with the Sharp IR sensor and then use the lookup code to convert the 0-1023 in to cm. I had to do some rearranging of code to make it work reasonably well. Here is a very poor quality video that shows the two working with each other:
s416.photobucket.com/albums/pp245/Kurts_Robots/?action=view¤t=Showscanwitharmmove-1.flv
If I have some more time, I may play with having it try to scan to find some object. The scan should be able to find both edges of the object and maybe move the arm over to try to pick it up. Should be fun.
Kurt
I watched the video, and now have a kink in my neck, lol 
Pretty darn cool! 8)
Hi Kurt,
I have to say you’re talented in making vids as well! LOL
The scanner works much better indeed! I’m happy you found a work around for the wait function. Bot arm and scanner are working pretty smooth now. I really need to try the code you’ve send me.
Damn, I need to find more free time…
[size=150]Time wanted! Over here! Time please… [/size]
Hi Jim, I finally found a way to rotate a video by 90 degrees, using Windows Movie Maker (came with vista), so I did that and uploaded a rotated version and changed the link above. So hopefully it won’t put a kink in any other necks
Hi Xan, It it not much of a video, but it did show the arm and scanner working. Yes you need more free time.
to late…
LOL, I was just fooling around. The vid did wat is was suppose to; show that you got the arm and scanner working!
Sadly I wasn’t kidding about my free time…