

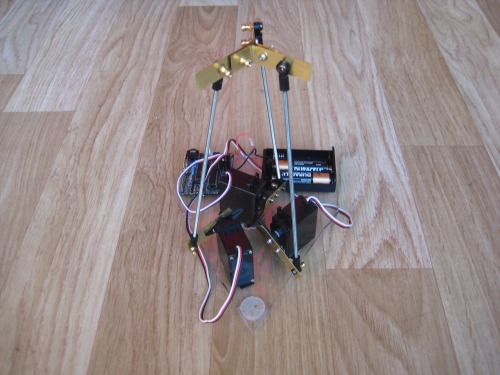
Here is my second robot, a delta robot.
I had no idea what a delta robot was until the other day, when I was browsing through old posts and came across this robot, created many epochs ago in 2009. I thought it was pretty awesome, so decided to make my own (although sadly my version isn't quite as beautifully made!).
The base is made of plexiglass, the rest is metal strip and rod. I used processing to make the mouse interface and picaxe to control the servos. It cost $0 to build because some of the parts I already had, the rest I got a week ago on my 14th birthday.
I will post a video soon - at the moment I am still trying to figure out how to move the mouse and control the camera at the same time (multi-tasking was never my strong point!). Hopefully when I do post the video, you will see why it's called Wobble ;-)
EDIT: Added another arm per servo, and uploaded video.
Pictures below:
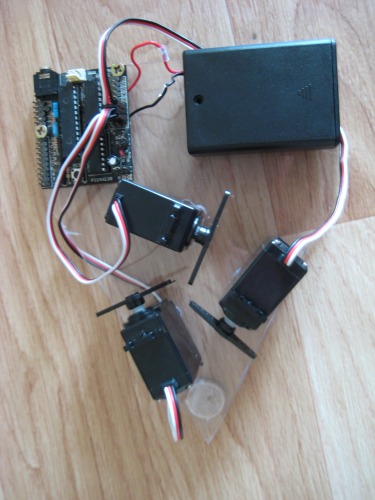
The base, before I put the arms on ^
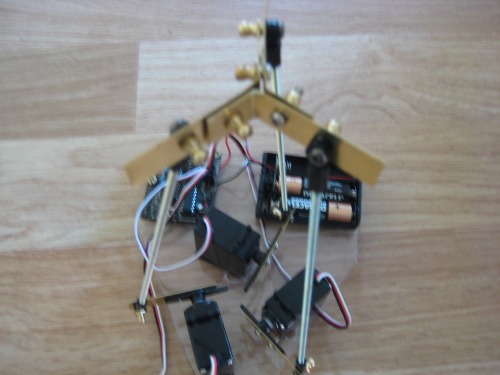
added the arms ^
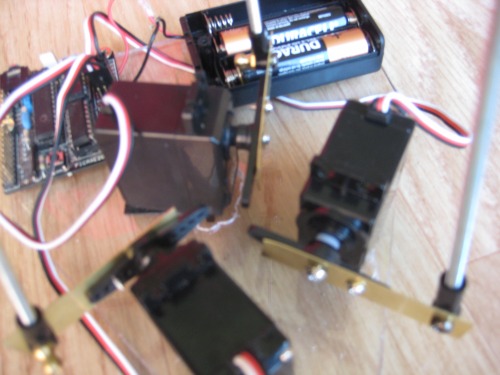
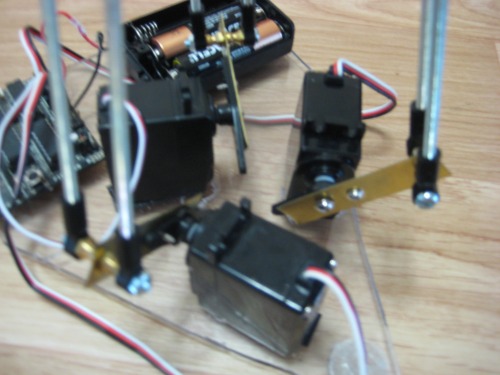
close up ^
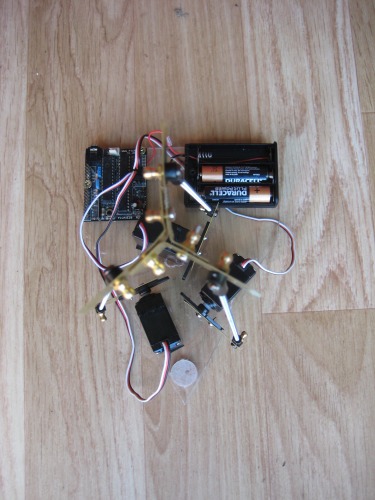
birds eye view ^

Err...waves it's 'arms' about
- Actuators / output devices: 3 cheap servos
- Control method: Mouse via serial port
- CPU: Picaxe 28x1
- Programming language: Picaxe basic
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/wobble-the-delta-robot