





I am basically in the middle of a long-term Walking Vehicle Project, dedicated to a passed science teacher.
February 14/10: I think that the chassis is basically done. The only change I need to make is the length of the feet (inward). Other than that I'm done. I've calculated that in order for the motor to lift me and the robot, it would need at least 1800 in-lbs. The max I can get with a decent speed is 1600 in-lbs. Thats three 2:1 gear reductions starting from a motor with 100 RPM and 200 in-lbs (correct me if I'm wrong). The gearbox will cost roughly $200 or so to build.
Also, I made a working, to-scale model in AutoDesk Inventor 2010 Student Pro Edition (provided by FIRST robotics club). According to the iProperties of the model, the robot will weigh about 50 lbs or so. Also the model lets me make change/ test parts safely, ensuring that I don't ruin the robot in real life.
December 26/09 Again: It finally took its first steps. Hand cranking it, it walks fine by itself. There is some tweaking to do, but the proof-of-principal has performed. A few revisions and reinforcements, and it should work as planned.
December 26/09: It has 2 feet now, hence its new nickname, "Two Feet". The build is going very well. Christmas money was a huge boost for me. I am even getting a job soon, which will help out a lot. The process is much more optimistic now, since i got past the most difficult part. Next up is the motor ans housing, and the redesigned 2-shaft gear train (actually a system of chains). A test-walk has been underway and has been mildly successful, enough to motivate me to keep building.
July 11/09: Right now the body is almost complete, but money is a huge issue. I'll be ebaying some stuff an hopefully later I'll have enough cash to get my motors. I need about 200 bucks more.
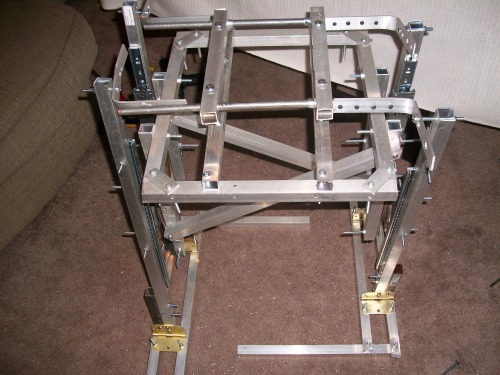
August 27/09: Chassis is doing OK. I had to shorten it to reduce the leverage on the right foot. Right now the chassis is stable and level, and one foot is almost complete. To finish this foot I will need to buy thicker bolts: the ones I have on now tend to bend too much. I am still in the process of saving money for more aluminum and for the motor and sprockets.
September 14/09: The foot is broken. The aluminum and steel have bent/ broke when I put the full weight of the robot on it. I'll have to replace the bolts with ball bearings.
October 23/09: Money is coming soon, and more frequent updates will be available. I feel bad that I'm moving so slowly. But I felt I had to give an update. There has been no new news except for this epiphany I had while in school about how to make the feet work better... Door hinges!
For video updates: http://www.youtube.com/user/theproof7
Walk with a pilot
- Actuators / output devices: 24 (12?) Volt DC 212 in./lbs. 100 RPM
- Control method: Piloted
- CPU: none
- Operating system: none
- Power source: 12 (18?) Volts DC
- Programming language: none
- Sensors / input devices: none
- Target environment: Smooth Surface
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/walking-vehicle-project-two-feet
 It it worth a try!
It it worth a try!
