

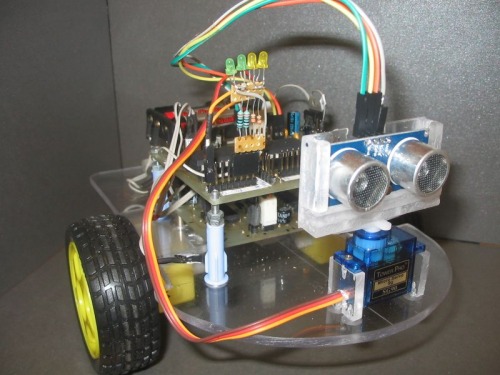
The robot shown here, which is based on factory parts. The HC-SR04 ultrasonic sensing type distance measuring device used. The sensing distance of 10-20 cm. The robot should turn around and go back up in this. The rotation sensor is carried out by a small servo motor, with the SG90's.
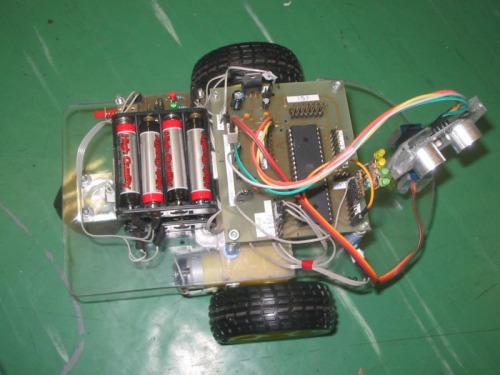
The robot is a top view.
Turning on the power.
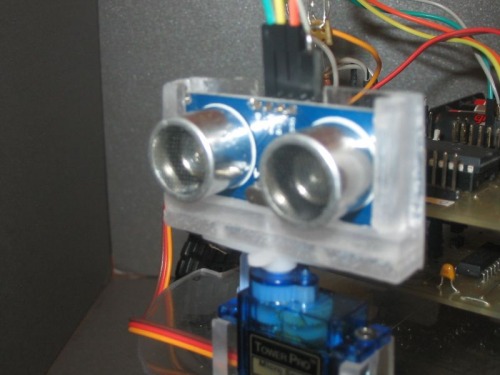
The ultrasonic sensor.

The robot and the spill-wheel drive is shown.
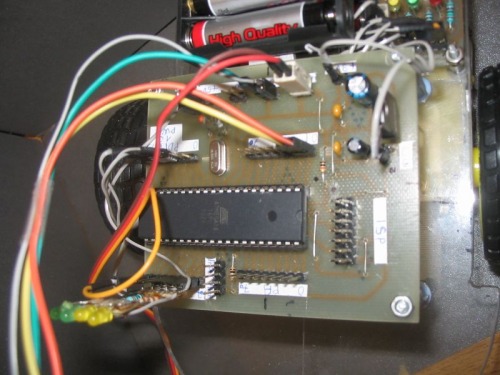
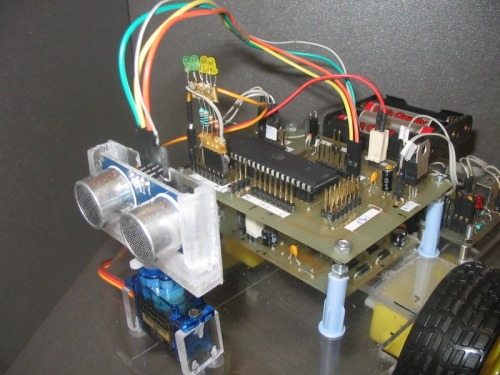
The central robot controller, an ATmega16 microcontroller.
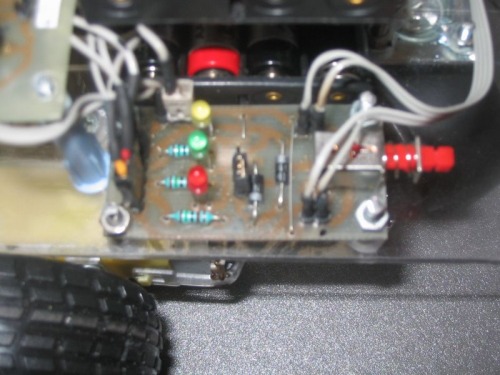
The robot motion previews and the four piece LED indicator.
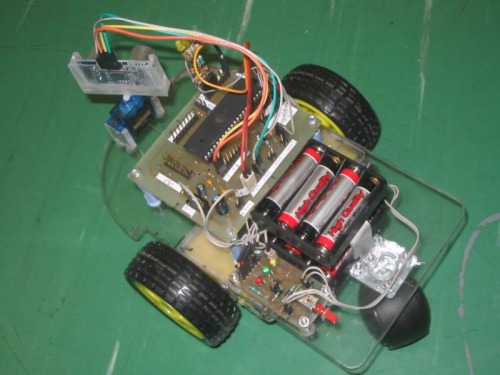
The robot more different views.
HC-SR04, ultrasound senzor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/ultrasonic-control-avr-robot