

Hi there!
After seeing the tank tracks that amando96 did for his AATV, me and Purdom decided to build our own tank.
We've started building it last Saturday and here are the first movies and photos.
The tracks are really good and easy to make, they just take a lot of pacience.
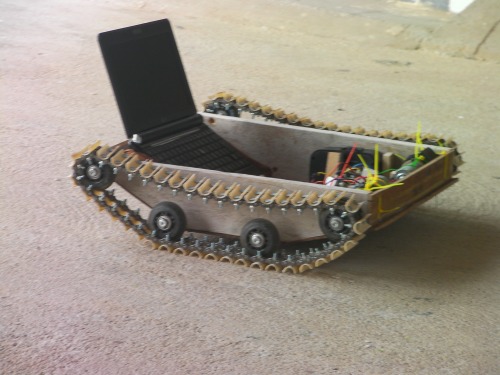
It uses two 15€ drills' motors, but instead of an metal chassis our has a wooden one.
We use a netbook on the robot just as Calex64 uses on his PROTOS III to reduce the costs and to facilitate the comunications.
On the controller PC we have a processing application that sends an information of a key we press over an ad hoc wireless network, on the robot PC we have an other application that intrepretates the information and sends it to the arduino that decides what command gives to the servos witch move the switches that control the motors.
UPDATE - 27 Sep 2010:
Here is the second version. I've built a new chassis, smaller but stronger.
I've made a tutorial about the control method that I use, which you can find here.
The movie of the second version was the last I've recorded before running out of batteries, that's why the tank was so slow.
Navigates remote controled by another computer
- Actuators / output devices: 2x Drill Motors controlled by servos
- Control method: undefined
- CPU: Arduino Duemilanove
- Operating system: windows XP
- Power source: 2x 12V for the motors
- Programming language: Arduino
- Target environment: outdoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/ttp-thetankproject-v2


