

Here's the latest from BOA-Labs: My first omni-wheeler.
It draws very little from the suggestion here. Most roving robots must turn to face their direction of travel. The plan with this one is that it should be able to move around in 2D space without having to turn to face "forward." It's called "holonomic" motion. It's annoying that so many variations on this have already made it to market. Other omni wheelers have a perceived flaw where they might slide off the sloped roof of your house. Not this one.
Programming it is going to be the entertaining bit. Have barely contemplated it. All ideas welcome.
I have reused the the controller from Harmenszoon. This controller was also used in my first biped. In fact, in modifyig the software to operate continuous rotation servos, I found a glitch in the biped code which may well re-ignite the project.
I'm seriously considering my old Psion Series 5 as a controller because it's got an RS-232 port and its own built-in high-level programming language (OPL). It looks like some clever bugger has already thought of that, although they use a Palm Pilot.
Video
The second video show the first signs of life. You're thinking "Cool, all he has to do it flip it over!" Not just yet. First I have to do the next bit....
The first video is the last video. It "does stuff."
Closeup PicturesSome pics of the chassis. Here's the underside, showing the arrangement of the three continuous rotation servos.
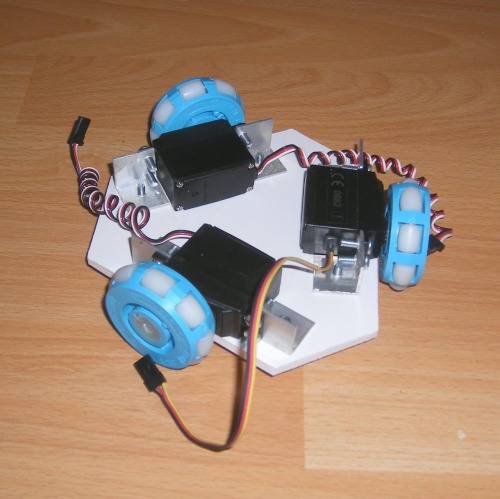
Detail of the servo mounting.

All the maths (discussed later in the threads) boils down to this:
d = SQRT(3)/2 (this also happens to be COS(30). Useful because 30+90 is the relative angle of each wheel to the chassis.
N1 = w - x
N2 = x / 2 - y * d + w
N3 = x / 2 + y * d + w
N1, N2 and N3 are the wheel speeds. w is the angular velocity (it can rotate as it travels).The Conclusion
It's time to take this one apart for the motors. I wanted to get it to do "something" first, though, so here it is moving around in all the prescribed ways on the floor.
The wheels weren't good - they were too slippy.
The servos in continuous rotation mode were extremely difficult to control accurately for speed.
A pity, really. I will try coating them with liquid latex or something at some point to make 'em more sticky.
Case closed.
Holonomic Rover
- Actuators / output devices: Continuous rotation servos
- Target environment: indoor, Smooth floor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/tow-triomniwheeler





