

The Window was built due to the observation that the coolness of a multirotor is directly proportional to the number of rotors it has, well that and the fact that my friend decided to sell me his quadcopter fairly cheap, my quadcopter, The Ugly Quad (https://www.robotshop.com/letsmakerobots/node/35079) has been sitting on a shelf in pieces victim of an upgrade that never got finished, and an unfortunate trait common in hobbyiests, that one's project could almost always be bigger and better. The goals I had building The Window are very similer to the goals I had when I built THQ: Payload capacity, durability, parts avalibility, and inexpensiveness, and I think that I succeded pretty well in all of those areas. Right now, The Window is remotely controled using an inexpensive 9ch Tx/Rx set and as such is not technically a robot (the debate rages on as to what constitutes a robot, but in my opinion, I believe that something must have some degree of atunomonity to be considered a robot) however I decided to put it in a "Robot" post instead of a "Something else" post because, well, I think it is more of a robot than a something else, and depending on if I can make my cheap control board stablize this sucker well enough, I may add an arduino and some sensors and let it fly itself around, but thats a ways off into the future. Anyway, onto the octocopter itself, first the boring stuff about it's origins:
As I mentioned, I bought my friend's quadcopter (he and I made ours at the same time using identical electronic components, but slightly different frame designs) so I had 8 identical motors and ESCs, plus the slightly nicer 9ch Tx/Rx set that he used for his quad, both of which I used, and his frame and control board, which I did not. So all I needed was a control board that supported 8 motor outs, and a frame (the control boards that we used had only six outs, so they were unusable for this build). I searched around the internet a little bit, and landed at my favourite hobby website, hobbyking.com and their KK2.1.5 board, it was simple, had 8 outs and preloaded firmware for an "X" style octocopter, and was, most importantly, cheap; $30 for a octocopter control board is pretty darn inexpensive. I bought one, plus a couple connecters needed for the project and sent it on its way from china. Next up was the frame; hobbyking sells a nice octocopter frame for $20 but, well, it looked flimsy, and after reading some reviews, I found that indeed it was. So I decided to build my own, I like building stuff anyway, and I had a great experence with the PVC frame that I made for THQ, so I decided that was the way to go. An octocopter frame is a little trickier than a quadcopter frame to build out of PVC because there is no such thing as an 8 way fitting like the 4 way + fitting that I used as the center of THQ, so I sat down with a pad of graph paper and tried to figure out the best way to make a frame with 8 equidistant motor mounts using nothing but standard PVC fittings. I came up with this: Bit of a blurry image (iPod touch cameras are not the best) but you get the idea, 4 arms radiating out of a + and then to a tee, then to the motor mount. Some triginomitry later, and I found the legnths of pipe I would need. I also decided to make the frame stronger by adding corners, and making it one big square. I cut up my pipe, fit it all together, put a screw in each join so that it won't rotate, and ended up with this:
Bit of a blurry image (iPod touch cameras are not the best) but you get the idea, 4 arms radiating out of a + and then to a tee, then to the motor mount. Some triginomitry later, and I found the legnths of pipe I would need. I also decided to make the frame stronger by adding corners, and making it one big square. I cut up my pipe, fit it all together, put a screw in each join so that it won't rotate, and ended up with this:
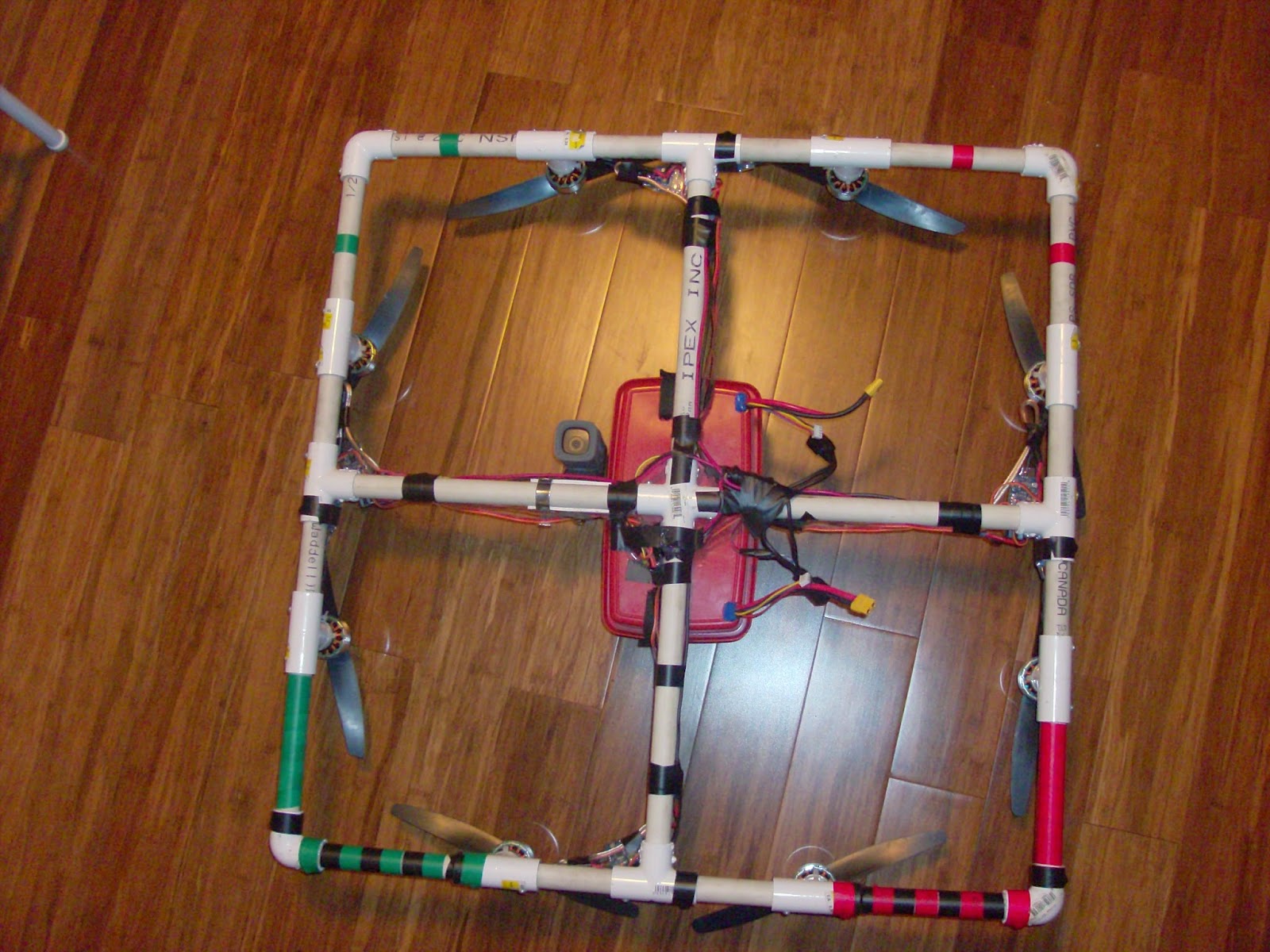
At this point, the frame reminded me so much of a classic windowpane, that I just had to name it The Window. To mount the motors to the frame, I used the same method as on THQ, I drilled 3 equidistant holes on the sides of each of the tees facing up, and used zip ties to attach the motor mounts to the tees:
Zip ties are good, because they are more than strong enough, and in the event of a crash, they will simply strech and break if the motors are subjected to any force, rather than breaking the motor. When THQ was running, I crashed it a great many times and never once broke a motor, my friend on the other hand, screwed his motors down and broke at least two in crashes. I mounted my already soldered together motor/ESC combos on the mounts and waited for my control board to arrive (in the picture you can see that some of the ESC power wires have been extended, these are the ESCs from my friend's quad, he needed to do that for his design, and it actually turned out to be handy.) My control board showed up in the mail from china, and I was ready to start finishing up, I made a wiring harness using 14 and 12 gauge wire to supply power to the motors, hacked together some nasty ESC signal extention wires, screwed a tupperware container to the middle of the frame for putting the batteries and electronics into (taking a cue from THQ's sucessful design), drilled some holes for wires to go thru, and mounted the electronics. I left the KK board in it's protective foam case, as was recommended in it's manual, and hot glued it down, along with the reciever and a temporary battery alarm (Hot glue? Check. Zip ties? Check. Plastic pipe? Check. This is starting to look like my typical construction methods, all thats missing is the Lego) To finish it up, I added some velcro to keep the batteries in, a mount for my Oregon Scientific "ATC mini" action cam, and some orientation markings using electrical tape, the black striped part is the back, and red and green are port (left) and starboard (right), respectively.



A shot of the bottom:
A closeup of the tupperware center:
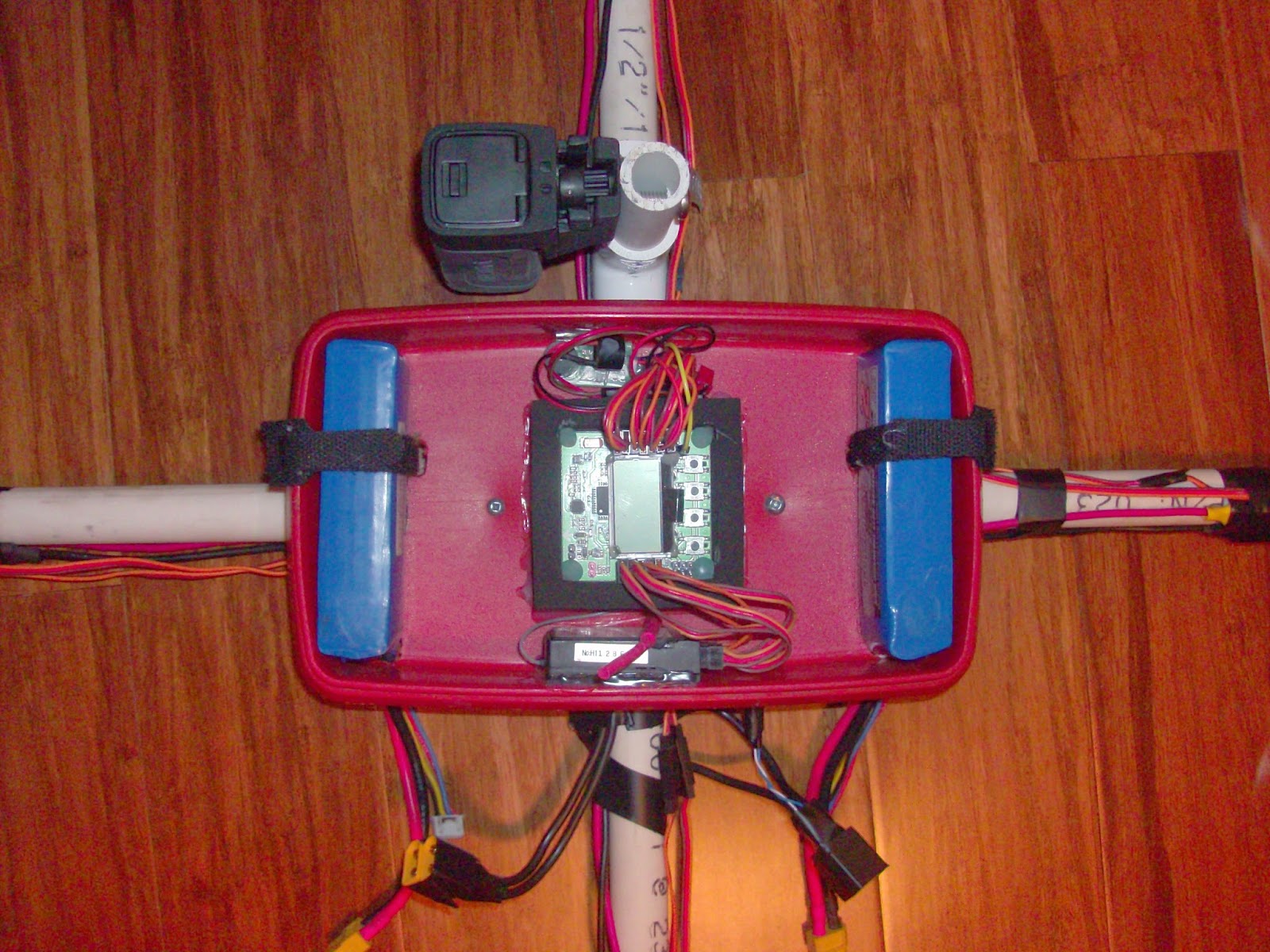
And a closeup of the camera mount:

In all of my pictures I have only two batteries mounted, they are 2.2Ah 20C 3S LiPos, but I have 4 XT60 battery input connectors, this is because to fly properly The Window needs to have 4 of the afforementioned 2.2Ah 20C mounted. This is because the motors that I am using can draw up to 18A each, times 8 is roughly 160A, and the batteries can only supply 2.2 times 20, approximately 40A per battery, times two is only 80A. It does fly with only two batteries, all of the videos above are using only two batteries, but the flight time is a disapointing 5 or so minutes, and I am not able to get full thrust from my motors, so my lifting capacity is reduced. At the moment I have only 3 correctly functioning batteries, and they are as old as THQ, so probably detereroating, but sometime when I get a little more dough, I will buy some more of the batteries from hobbyking. Speaking of current draw, and trust and specs, the octocopter with no batteries weighs approximately 2.6kg, 4 of those batteries together weigh 0.7kg, so all together still under 3.5kg takeoff weight, and the 8 motors together produce a little over 9kg of thrust when they are running full out, so I have some payload capacity to work with. As for durability, the frame is quite strong, with very little flex, and should stand up to lots of abuse, and if it ever does break, parts are 1 hardware store trip away. I am flying right now with the defualt P and I settings on the KK board, and stability is not stellar, but still much better than my quadcopter; I believe that once I tweak the P and I settings a little bit, it should make a nice steady platform.
Here is a (hopefully) complete parts list with prices for The Window:
1. Eight of these motors, $97.52 if you wait on the page and take hobbyking's "one time only offer" (that will apply to all further purchases) http://www.hobbyking.com/hobbyking/store/__6247__hexTronik_DT750_Brushless_Outrunner_750kv.html
2. Eight of these ESCs, $95.28 http://www.hobbyking.com/hobbyking/store/__13429__HobbyKing_30A_BlueSeries_Brushless_Speed_Controller.html
3. Three packs of these props (the extras will come in handy if you crash), $8.79 http://www.hobbyking.com/hobbyking/store/__11333__10X6_Propellers_Standard_and_Counter_Rotating_6pc_.html
4. Four packs of these connectors (more if you want to use them for the motor/esc connections), $6.92 http://www.hobbyking.com/hobbyking/store/__68__PolyMax_3_5mm_Gold_Connectors_10_PAIRS_20PC_.html
5. One pack of these connectors for hooking the control board to the rx $4.00 http://www.hobbyking.com/hobbyking/store/__21758__10CM_Male_to_Male_Servo_Lead_JR_26AWG_10pcs_set_.html
6. At very minimum, four of these batteries, $31.56 http://www.hobbyking.com/hobbyking/store/__8932__Turnigy_2200mAh_3S_20C_Lipo_Pack.html
7. Four is nice, but not necessary, one for sure, of these LiPo chargers, $17.96 http://www.hobbyking.com/hobbyking/store/__7637__Turnigy_balancer_Charger_2S_3S.html
8. This Tx/Rx combo (a cheaper one is ok too, but this one is nice) $59.99 http://www.hobbyking.com/hobbyking/store/__8992__Turnigy_9X_9Ch_Transmitter_w_Module_8ch_Receiver_Mode_2_v2_Firmware_.html
9. One of these control boards, $29.99 http://www.hobbyking.com/hobbyking/store/__54299__Hobbyking_KK2_1_5_Multi_rotor_LCD_Flight_Control_Board_With_6050MPU_And_Atmel_644PA.html
10. An Oregon Scientific "ATC mini" action cam (I got mine on amazon.com for $40) $40.00
11. 1/2" PVC pipe fittings and 20' of pipe for the frame, from your local hardware store, mine cost less than $15 altogether.
12. A pack of 4mm nuts for the propellers, wood screws for the frame, a tupperware container, hose clamp, electrical tape, and 12 and 14 gauge wire ~$30 or so, depending on what you have lying around
13. Battery alarm $3.99 http://www.hobbyking.com/hobbyking/store/__7223__hobby_king_battery_monitor_3s.html
14. One pack of these for connecting the batteries: $3.29 http://www.hobbyking.com/hobbyking/store/__9572__nylon_xt60_connectors_male_female_5_pairs_genuine.html
15. Two packs of these for the ESC wires: $4.98 http://www.hobbyking.com/hobbyking/store/__20960__45CM_Servo_Lead_Extention_JR_with_hook_26AWG_5pcs_bag_.html
And I think that is it, grand total: $449.27 plus shipping
So right now, I don't have enough batteries to properly have this thing fly, but it still does reasonably well with just the two batteries. A project such as this is never complete, but for the moment it is at a happy stable functioning place. Future plans (or in other words, things that I would love to do, and will talk about doing a lot, but probably never quite get around to the actual doing of) include: A pan/tilt turret with video feed back to the ground and a seperate tx/rx for someone else to film while I do the flying and some landing gear, mounting a laser aimed paintball gun on it, and perhaps atunomoizing it with an arduino, as mentioned above. As small progress is made, I will update my blog, and if something large ever gets finished, it will go here (I am not sure if the new site actually shows the link to more information link, you can find The Window's part of my blog at http://boomsandbots.blogspot.ca/search/label/The%20Window )
For now tho, I think that I have claim to the ugliest octocopter on the internet. Man I love plastic pipe.
Flies around, takes aerial videos, looks ugly
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/the-window
