

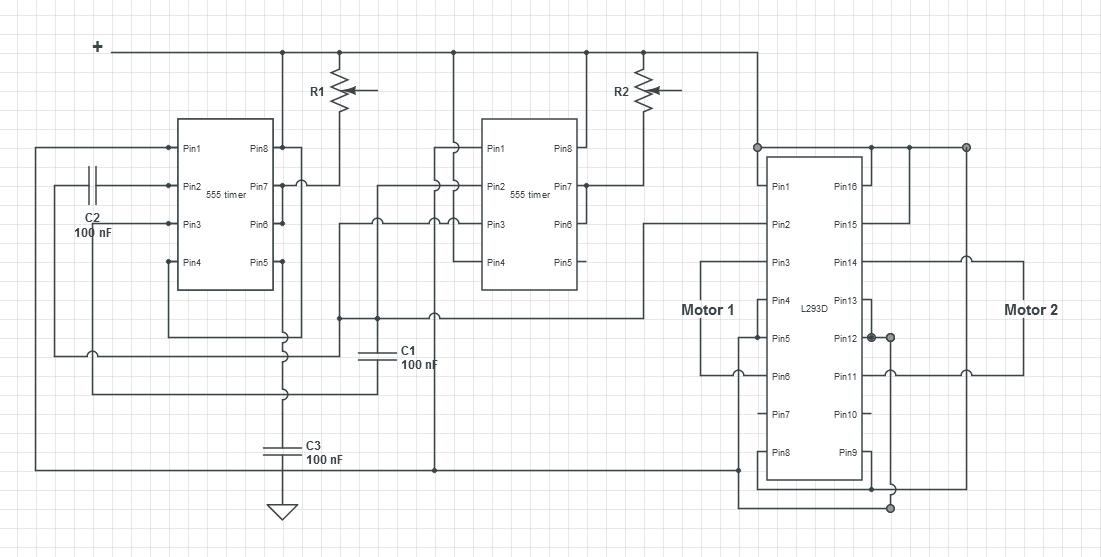
hello LmR! This is the final product of my work on the GEO-bot! With help from you people in my previous post i could overcome mechanical problems! for those who did not read the previous post -- The geo bot is a 555 timer based bot. it runs on two 555 timer IC and one motor driver IC (l293d). No micro controllers! Two timer circuits (1 & 2) are made using 555 timers. they are interdependent. when one timer is out the other is activated. one motor keeps on rotating continously. The other motor lets say m2, stops when timer1 is out and this makes the bot turn. it is reactivated when timer 2 is out! (interdependent.) By adjusting the Pots at pin 6&7 of the timers you can make it go in different regular polygons..... quite accurate figures!
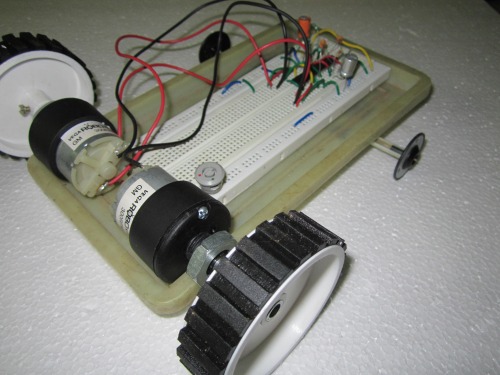
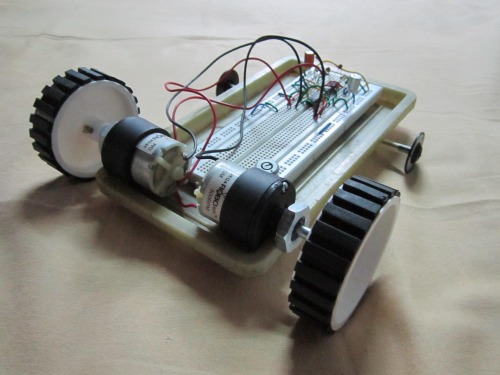
More compact deisgn!
Draws Regular polygons!
- Actuators / output devices: geared motors....
- CPU: brainless!
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/the-geo-bot
{kind=link}