

I started my RepSCRAP (RepRap made from junk) last April, and based it on a pair of Arduino Pro-minis. It was ... well.. marginally functional, then summer hit and family time and ... <insert procrastination excuse here>
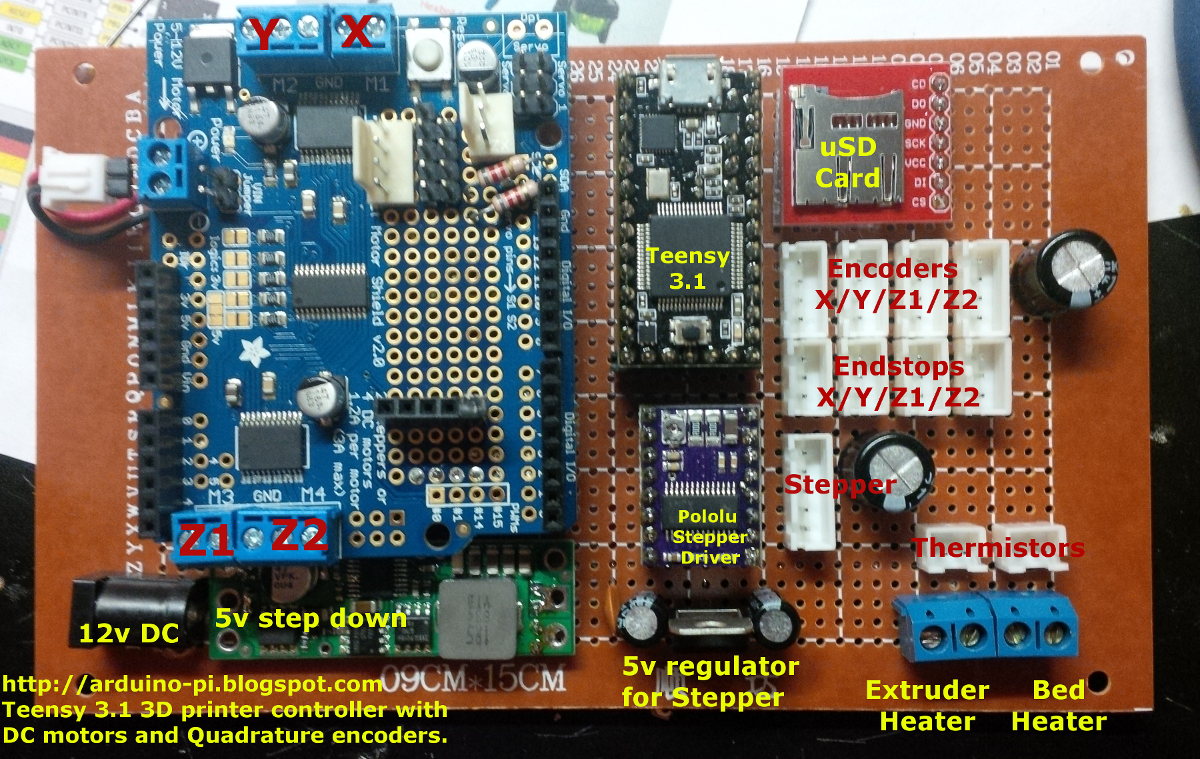
So I came back to the project recently, and have restarted my control board based on the Arduino compatible Teensy 3.1 32bit Freescale K20 ARM processor. It runs at 96Mhz, and has two hardware based "flex timer modules" used for quadrature decoding.
I've got X and Y axis closed loop servo control accomplished. now I have to work in the two Z-Axis motors/Encoders...
I'm currently taking a fair amount of heat over the decision to abandon the traditional Stepper Motor solution in favor of DC motor/Encoders... Fun times...
Using 32bit ARM processor and DC motor/Quadrature Encoder replacing ATMEGA/RAMPS/Stepper motors typical of 3D reprap
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/teensy-3-1-based-3d-printer-controller
