

I just started with robotics a few months ago, I started with the boe-bot and basic stamp2. A good learning platform, but I quickly found it's limitations.
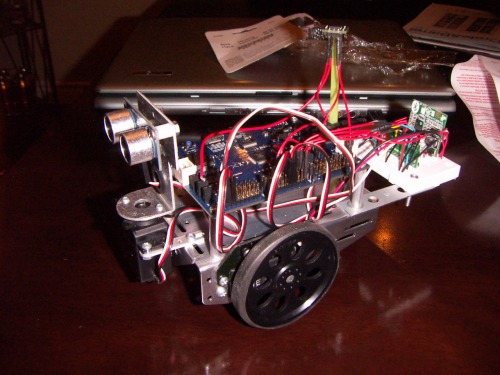
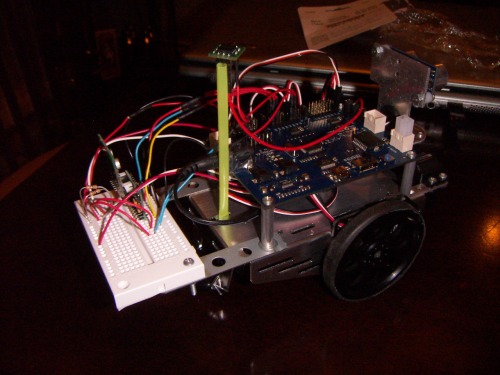
So I went for the propeller, and fitted the MSR1 robot control board to the boe-bot chassis, with wheel encoders, HMC3652 compass, easybluetooth module, and ping sensor. My goal was to teach the boe bot to navigate around the living room, using dead reckoning, compass directions, and corrections made with the ping at each waypoint. And overall, it worked very well. Just enter the X and Y coordinates, and it will go there (more or less).
I wanted to build a robot that could actually do something usefull, like pickup a beer bottle, and take to the bin, and sit it down along side. This could only be achieved if the robot can determine where it is with good accuracy, probably less than 5mm.
I found the ping sensor to be very accurate and repeatable, within 1mm usually. The compass is little tricker, very jittery, I fixed most of the problem using an averaging program I wrote, but it also gives different reading at different points of the room, up to 45 degrees from one side to the other, possible due to EMF ??
Anyhow, I bought the 1/16th scale Heng -Long tank, which shoots BBS and makes smoke too, which was fun, but it seems so pointless when it can't think on its own, so within half hour of un-wrapping it, I had it in pieces, and starting moving my robot bits onto it.
The Boe-Bot chassis, with compass (attached to drinking straw), easybluetooth, ping, propeller, and wheel encoders.

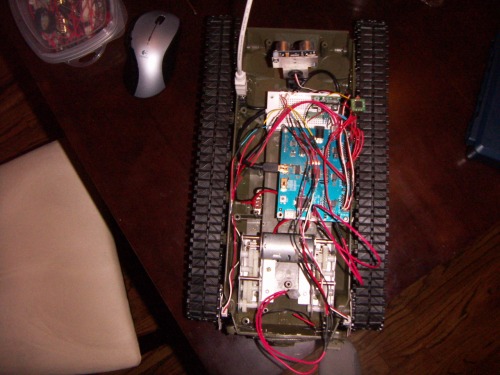
The tank, with all non-esential bits removed.

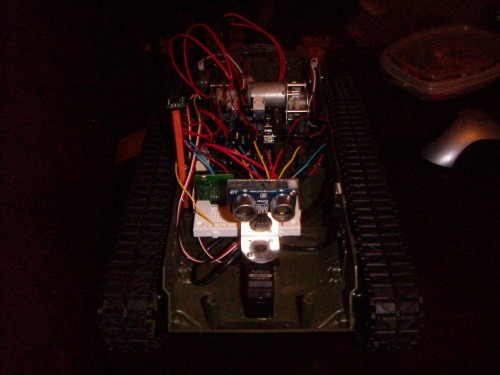
The Propeller MSR1 RObot board fitted into the tank frame, with compass, easybluetooth, ping, and wheel encoders.
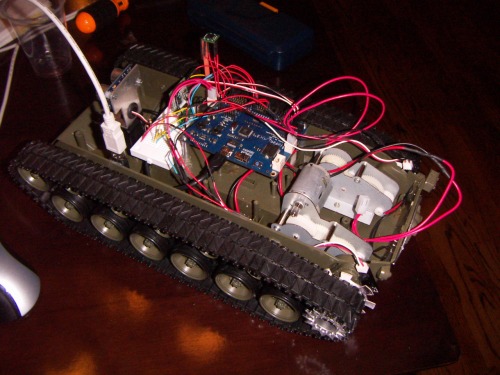
Wheel encoders are original boe-bot ones, just slapped together temporarily, I have some smaller ones on order
which I will fit inside the geaboxes. I hate waiting for parts !!!

Navigtes around the house using waypoints and ping corrections.
- Actuators / output devices: DC Motors
- Control method: autonomous
- CPU: Parallax Propeller
- Power source: 7.2V
- Programming language: Spin
- Sensors / input devices: wheel encoders, compass, PING
- Target environment: indoors
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/tank-bot

