

The other day was talking to a friend who is animageek. She was asking: "Why don't you build a Tachikoma? It looks like doable!". Man! That's way far than what I capable of "building" robots! Think about those feet can transform to a wheel! How could that been done in nowadays? Even its transformable it won't be able to carry the weight by that kind of design; furthermore, that freaking big ass is impossible to balance a bot like that. Forget it, it's animation. But night after night, it just can't get out of my mind the possibility to build that thing. Fine! I will try to challenge it it, at least do a simple version of it. So, that's how it begins....
Found micorwaveable food covers that perfect for the body shape:

The shampoo bottle that perfect for the feet:

The used parts from Tetris perfect for "bones":

Kill my old quad-leg robot for leg:

Some cheap continues servo and wheels from eBay and modify a bit:

Find some basketballs from Toys'R'us and used pipes.

Cut holes here, fill up some holes there and sand it a bit:

Steal couple milk bottle from my wife and lego parts from neibour's kids:

I can't find better shape for that fat ass. So, cereal box is my choice:

And finally.....SPIDERS!! Perfect for multi servos machine:
Give it some color:

So far so good. Now, I am an idiot in electronic and maybe later on programming as well. I might start asking stupid questions around LMR or other forums. Please help me if you see me dying for waiting answers :P
I try to make eyeball LOOKING around and I suddently realize how diffecult to make ball spin in the air and centerize it perfectly. Look at this ugly eyeball:
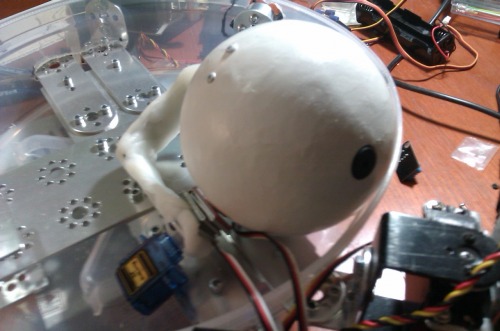
It looks fine like that, but when I put inside the shell, it's not centerized well and I spend so much time(2 weeks) to figure out how to put it in proper position. And I end up give it up and just hot glue it in the shell. What a shame... I still wanna poke it out and make it "looking" around.
And here is how I connect that big ass cereal box:
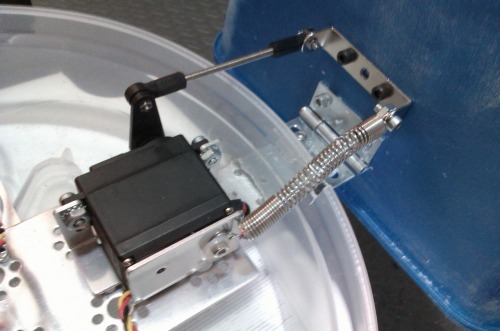
Here is how I make the leg and wheel:

It's getting heavier everyday by adding this and that:
Forgot to mention I use wireless camera inside the eyeball and the antenna is the one that point out from the center of its head.
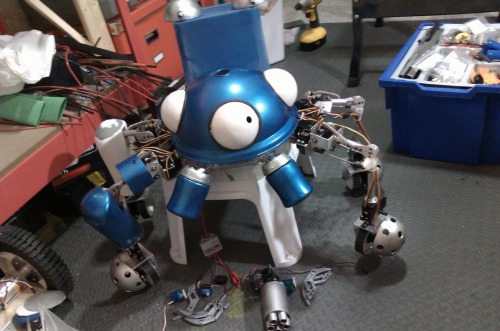
This is how it looks now in AUG,29/2011:

I try my best to use image to describe how it been build so far and hope you can understand how it work in this chassis. Please point me out where I can improved or modified. In this stage now, I am working on CLAWS and still want that eyeball able to move. Feel free to tell me all mistakes and any improvement.
8 LEDs had been added to the "S" box.
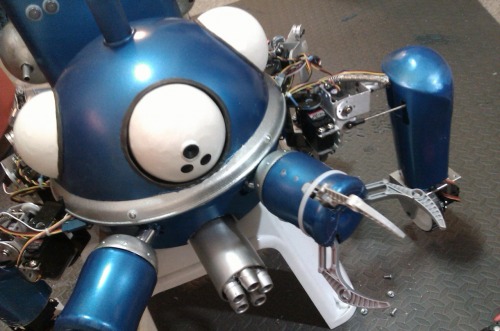
The claw from LEGO had been added too. I use a mini servo to bull all 3 claw from inside of the body.

The other hand just simply adding a laser and I don't think I will add another working claw but fake still claw in laser side. It just too complecated spacing issue to put evrything in lilmited space.
Whole chassis should be done soon and hopelly move to programming stage next week.
- Actuators / output devices: 13 servos, 4 countnus servos, 2~4 mini servos and one motor.
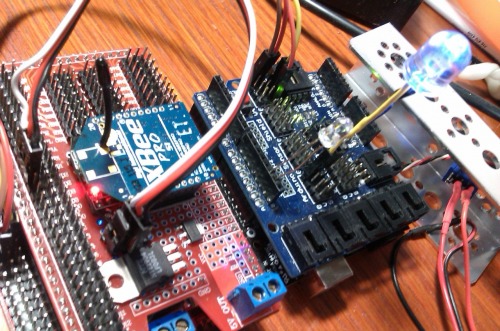
- Control method: remote controlled via ZigBee
- CPU: Arduino + Spider (2 Arduinos)
- Power source: 2 7.4V Li-ion battries with 6V regulator.
- Sensors / input devices: xbee, Ultrasound sensor
- Target environment: indoor perhaps outdoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/tachikoma

