So I've trying now for a few weeks to have my rock crawler, named Sputnik, be autonomous. The goal is that it should be able to avoide any objects on its path, and while looking around, it should record data on a SD card such as Temperature, Humidity, Light Intensity, Atmosphere Pressure (more to come).
Second is that it can overrided to be manually operated with xbee and a logitech joystick, directly from my mackbook.
Done so far
The structure is finaly finished, it took me a long time to finish the Rock Crawler mainly because of having the wrong tools and not enough time. Once the structure was finished I moved on to the electrical componants and programming part of it. I am completly new to Arduino, so I spend lots of time looking around on the web on what could be done and how.
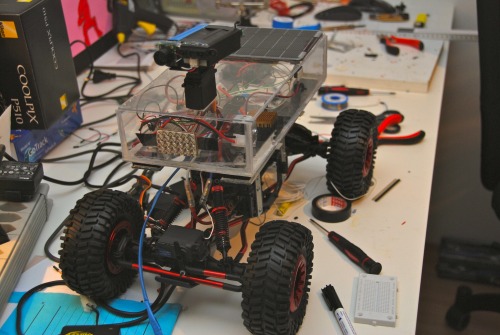
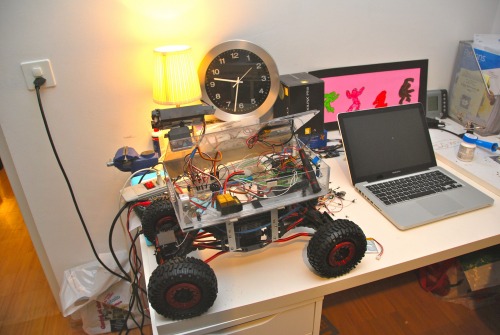
The structure is finished, the crawler is done, and a plexiglass body is fixed on top, housing all my elelctronics. I will publish pictures later.
Material
From Tower Hobbies
DuraTrax Sprint Electronic Speed Control $29.99 (esc for brushless motor)
Venom Fireball Rock Crawler Motor 5 $19.99 (brushless motor)
Venom Creeper Competition Rock Crawler Kit Anodized Red $143.99 (body structure)
Venom NiMH 6-Cell 7.2V 3000mAh Stick Universal Plug $20.99 (battery for the motor and steering servo)
Associated S1903MG Servo w/Metal Gears $17.99
From Adafruit
Adafruit Data logging shield for Arduino (v1.0) [ID:243] = $19.50
Medium 6V 2W Solar panel (2.0 Watt) [ID:200] = $25.00
Lithium Ion Polymer Battery - 3.7v 1300mAh[ID:258] = $12.00
TMP36 - Analog Temperature sensor (TMP36) [ID:165] = $4.00
Photo cell (CdS photoresistor)[ID:161] = $1.00
2x XBee Module - Series 01 (XB24-AWI-001) [ID:128] = $46.00
USB FTDI TTL-232 cable (TTL-232R 3.3V) [ID:70] = $20.00
Total : $366.45 lots of these componants can be found around depending on your project
What is the final intended environment of this bot? I ask only because I acquired a similarly laid out toy for a couple bucks at a resale shop (Goodwill). I admit the one I got is really, really just a toy. It is basically plastic, except for the parts that have to be metal. Given that it is a cheap RC vehicle there are a few tutorials on interfacing with the receiver board. Also, my toy is probably half the size of your RC frame. And, my toy has dual live axels vs what I would guess is probably 4 wheel independent suspension.
I noticed the Solar was less Volts and watts than the battery. Do you have a sensor that runs it on solar by passing the battery when the panels have voltage? Is the ultimate goal to charge the vehicle whenever possible?
Great form to work with. Looks like it can climb anything and might not have to go around very much.
Amando96 … i see what you mean… but as a weather station, i didn’t want it getting stuck all the time by a little branch or something, so it could have a large enough body to collect the required data…
The ultrasonic sensor and IR are placed high enough so it would be able to climb a few rocks instead of avoiding them… I hope that i’ll put soon a video…
Birdmun, the final environment for this crawler will be in a montain, at about 1’800 meters altitude. For now, it’s practice terrain is my backyard… so it’s body is not yet protected… yes theis is 4 wheel independent, it’s a very powerful rc vehicle, not the best, but for the money i was ready to put, and from what i read, it seems to be a nice crawler. I will see how mine adapts this winter outside, what broke, what didn’t, then modify the plexiglass to aluminium. The hardest part would be to make it waterproof…
Hey Shonlh, I have noticed the same with solar, and that is why for now, i am not using it. I still didn’t figure out how to switch from one battery (low) to another (high) and recharge the low one with solar.
I am still working on a solution for this. For now, the only thing running on solar rechargeable battery are the leds, that are not the “vital” part of this project… but looks cool…