



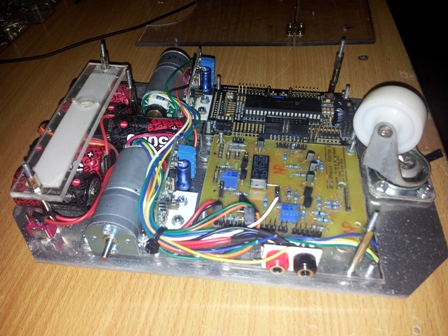

- Picaxe 40x2
- 2 x Pololu Motor Controllers
- Tilt compensated Compass
- APC220 Wireless Serial (1 Km Range)
- 5 v / 2 A SwitchMode Power Supply
- 6 v / 5000 mAh NiMh Batteries
- 3 x 9 v / 160 mA Solar Cell (Wired in Parallel)
- 6 v / 6000 mA 34:1 Motors w/encoders
- 2 x 80 cm Sharp IR
- 1 x 150 cm Sharp IR
- SRF04 Ultrasonic
- 2 x LDRs
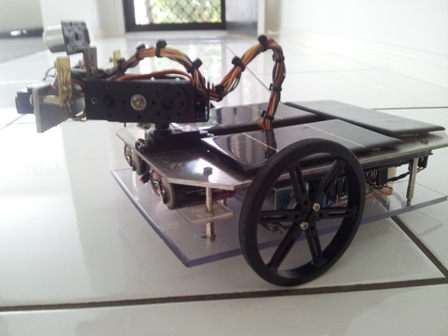
- 2 x MG995 Servos for Pan/Tilt
- Real Time Clock
- Custom Power Management Circuit
Custom Power Management Circuit:
- BC337 Transistors for each IR led power (Picaxe Controlled)
- 5 x BC337 Aux Picaxe controlled transistors for expansion.
- Latching relay to switch solar on/off. When solar on, power cut to all circuits except picaxe.
- Adjustable voltage dividers for solar and battery voltages.
- Battery into board distribs to switchmode power supply to feed all logic curcuits.
Tests Performed:
- All sensors and circuits are working as expected with the picaxe.
- Performed basic object avoidance test using IR and Sonar. Used sonar to detect long range objects. If no long range objects detected, motor speed increased. Motors capable of 3 meters per second. Speed slows down as obects approach. Closer objects accuracy increased with IR assistance.
- Compass tested as expected. I was suprized as I expected interference from local magnets in servos and motors.
- Currently performing solar charge data logging. Having success with charging, although a little slow. Currently I have setup the robot to read voltage from both solar and batteries every half hour and transmit through wireless serial to a webserver I have setup. This allows me to monitor from anywhere. I think I will increase the charge rate by adding more solar cells. Due to space restrictions, I will lay them on top of existing cells and have servos fold them out like a flower when it goes into charge mode.
Goals:
- Real time clock will be used to tell robot it's morning. LDRs used to confirm sun is now risen. Compass used to direct robot to east side of house where the sun is rising. LDRs used to track best position for charging. Solar voltage reading used to see if adequate voltage present for charging.
Master Plan:
This Robot is only 1 part of a bigger project. I am also currently building a much bigger robot standing about 1.5 mtrs tall. Base is 600mm long, 450mm wide. Enough space inside to fit as much hardware as I like. It is running a 2.4ghz dual core Laptop. Has a 15 in LCD screen in it's back. 12v / 48 Ah battery, 400 mA Solar. Motors that are powerful enough to carry me standing on it's back. A ton of ultrasonic and IR sensors. Video camera also used for navigation, face recognition, motion tracking, etc.
The small robot will be a scout for the larger robot. The small one is faster and more efficient. It can do some of the work for the larger one and transmit it's data back. The large robot can process much more data, faster, then give instructions back to the scout.
The large robot will be running many programs such as facial recognition software, which I have already tried, and found it to be quite accurate. Same software can be used for any object recognition. Because it is PC controlled, It can have speech synth and voice recognition. Custom software can be written in C for navigation, etc. I may also attempt to water proof the large robot so that it can go outdoors if its needed.
Before I go too much further on the large one, I need to master object avoidance. I have found this larger one to be quite powerful and if it runs into a wall in the house, it will cause damage.
Navigate by Ultrasound, IR and compass. Self charging
- Actuators / output devices: 34:1 Drive Motors with Encoders, 2 x Pololu Motor Controllers
- Control method: autonomous
- CPU: 40x2 Picaxe
- Power source: Solar, 6V - 5000 mAh
- Sensors / input devices: Sharp IR, LDR, compass, SRF04, Bluetooth, Rotory Encoders, Solar
- Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/smartbot-1