10/23/2013 - A circular base is prodcuced with a 3D printer.
The base also serves as a very efficient soundboard for the 'motor speakers'. Now the music from the speakers is very loud. Sample music Jingle Bells is attached.
10/07/2013 - RC receiver is added as additional input
09/08/2013 - An IR edge detector is added to the Doodle Bot.
08/29/2013 - An art work done by the healthy Doodle Bot is sbmitted to the Challenge.
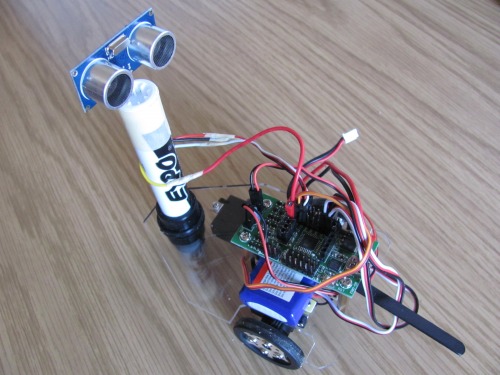
08/25/2013 - An acoustic sensor for range measurement is added to the Doodle Bot. It can now move around without hitting the walls as seen in the attached video.
08/22/2013 - An art work done by the handicap Doodle Bot is sbmitted to the Challenge.
08/14/2013
Bought the Dagu Doodle Bot kit from Hobby King. Assembled together and uploaded the Doodle_Bot_Text_Demo_with_Music. It will play music and then draw a one-and-a-half circle and then a small arc but not the text. I believe there is something wrong with the board. Do you agree?
Actuators / output devices: speaker, servo
Control method: autonomous, RC
CPU: Atmega8A
Power source: 7.4V Lipo
Sensors / input devices: IR, sonar, Light, RC Receiver
With the current wiring, it will play music, draw 1 and 1/2 circles CW (right motor turns) , stop , the left motor turns a small step, and stop.
When I swap the sensors, it will play music, draw 1 and 1/2 circles CW (right motor turns) , stop , the left motor will turn continuously without stop.
When using the following code to check the status of the sensors and motors, I found the problem.
Both sensors work fine.
Left motor will turn CCW - digitalWrite(7,0); analogWrite(9,100);
Left motor will turn CW - digitalWrite(7,1); analogWrite(9,100);
Right motor will turn CCW - digitalWrite(8,1); analogWrite(10,100);
Right motor will NOT turn - digitalWrite(8,0); analogWrite(10,100);
void loop(){ // read the state of the hall effect sensor: hallState = digitalRead(2); digitalWrite(7,1); analogWrite(9,100); if (hallState == LOW) { // turn LED on: digitalWrite(13,1); } else { // turn LED off: digitalWrite(13,0); } }
The Doodle Bot user manual says the supply voltage: 5V-9V. The max voltage for a 2-cell lipo is 8.4V and The jumper near the power switch is set to 5V from the factory.
I received my new Doodle Bot 2 days ago. Made a brain surgury of my handicap bot by replacing the controller board. Now my bot is healthy and can move forward but is not very accurate. The repeatability is poor.
Made another entry to the Doodle Bot art competition. Here is the link:
While waiting for my new Dagu Doodle Bot to come, I made some modification of the standard demo program. Now my robot can go backward, turn to the right, and turn to the left. To go forward, I have to turn 180 degrees.
Here is the self portrait of my doodle bot - a handicap robot which can only go backward.