One has very fine control over the tracks… especially if one has a caliper! But yes, I think I might just make the next try a little differently.
On brighter news, My Atom Pro is blinking one of the BotBoard LEDs!! (Hush… thats a big step for me considering how long its been!)
If anyone is curious, I bought a SIIG CyberSerial 4S to give my computer some serial ports, and it seems to be working fine in Vista x64 Ultimate.
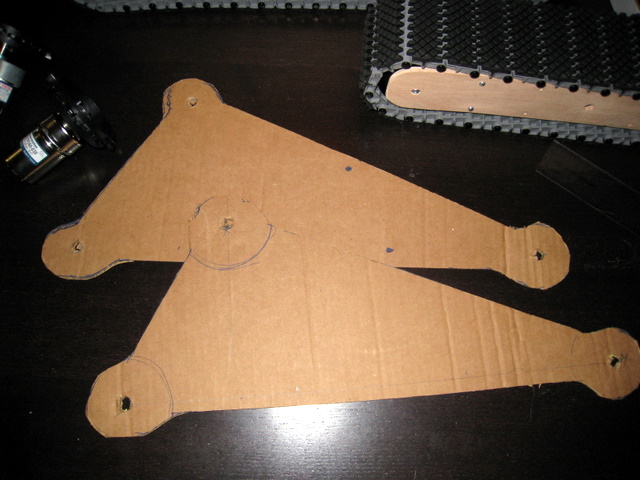
That would be awesome if you do get it working. The first time I tried making a custom sized track shape, it came out not even close to matching up the tread segments. After that I switched to the less traditional robot material, cardboard, to solve for sprocket locations.
Using that and 5/16" dowels to hold the sprockets, I sized it out manually till the track was pretty taut, and used those positions for the sprocket holes.
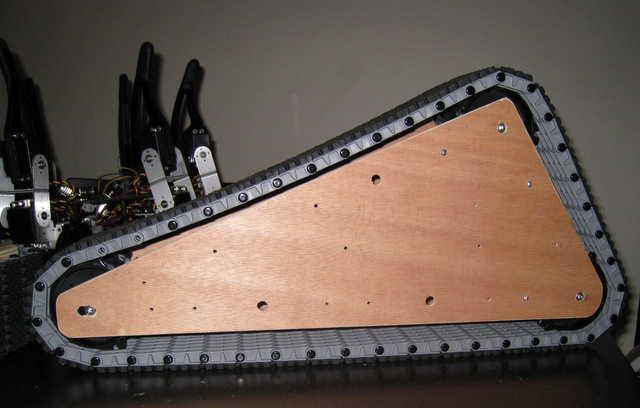
Then used 3/16" plywood to make the sides with.
Still didn’t get it quite right, but close enough that its fixable till I make a final template that can be made of a sturdier material.
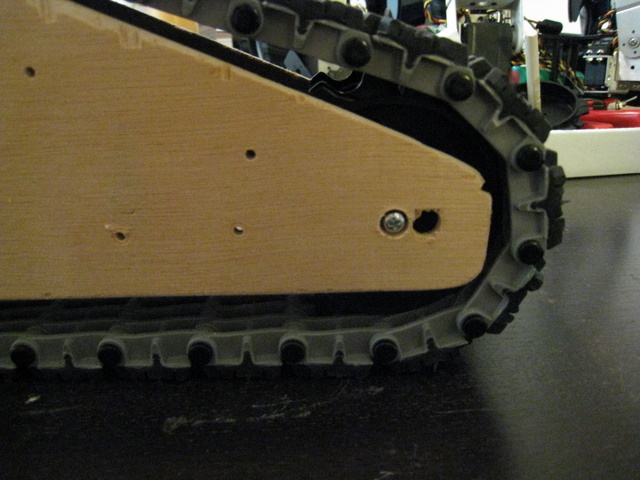
From the little I know about tracked gizmos, if they are fairly small, put a non driven axel shaft, like a front shaft, in a horozontal slot so it can be adjusted front/rear for tension adjustment and easier track removal.
the thing with that though guys is the fact that you have to fine some way of securing it in place
since LM tracks have ball bearings on the end there is no way to tighten them up, i thought of the same thing before but i couldn’t find a way to keep it from constantly sliding around in the slot
You can secure it in place by adding two bolts and nuts, one on each side of the bearing in the same slot. So so long as the nut and bolt is secure, it should be able to hold the bearings in place. Of course you’d only need one if bearing of the sprocket is at the either end of this slot.
The nuts or bolts or whatever would have to be huge to span a 8mm gap. In turn, that means that they are going to be rubbing against the HUB-13.
The easiest way to take up track slack is to add sprung idlers, as others have suggested. I think there is a way to do a fancy sandwiching of lexan to adjust track tension as well on a HUB-13, but it needs more thought.
Ok, bit the bullet… ordered 3 HS5645MG and 3 HS5625MG servos, and their programmer tonight. ouch
Together with three out of the four CS160s that I have, that will make enough for my tripod. (which is what I really wanted to do, not the four servo walker…)
Yes, the HS5625MG servos go against all the instinct of people on this forum. But considering their final destination is in the Phoenix anyway, I think its time someone on the forum experimented with speed rather then raw strength
I finally got my DE order, LM got better today and I got my UPS notice from Beth, so in a week I should have all of my orders to begin the tripod…
Meanwhile, I have been going through old boxes of junk and junking most of it this week. I salvaged a foam missile launcher from a cheap walmart toy, so my tank is going to have the ability to launch ten foam missiles! :joy
I don’t see why the HS-5625MG would go against anyone’s recommendations here. It’s a Hitech digital servo, and as long as it fits the SES brackets, it should be just fine. It doesn’t seem to be too much faster than the HS-5645MG though. It will be good to see how you compare them.
Hmm… yes… I think I was imposing some other servo’s specs on the 5645 and thinking it was a .24second servo or something… Oh well, more science experiments!