

UPDATE: 28 Jan 2014
So Vexter is no more or he has been upgraded to point of minimal recognition.
This is now Sherlock. He will amusing me and my kids in the near future. He is designed to play hide and go seek using a variety of sensors. The PIR motion sensor will detect warm bodies and will guide the robot to a general vicinity, the ultrasonic sensor will be used for obstacle avoidance and detection and the compound eye will look for movement at close range. Once Sherlock is "tagged" he will look for a dark place to hide.
I have a good idea of how it will all work together and I do have my concerns with my current sensor setup. The PIR will require a shroud to give it a narrower field of view. I may have to make an array of PIR's to create better motion tracking of humans. Although I am expecting it to signal high if the sensor "sees" someone and the robot moves
Currently I am working on the sensor control code but for now I can drive the robot with an IR remote. The "bunny ears" that you see above the compound eye are mounting brackets for an iPhone. I can record video from ground level or use Skype for remote operation. The compound eye and phone is mounted to a pan/tilt turret
18 Jan 2014
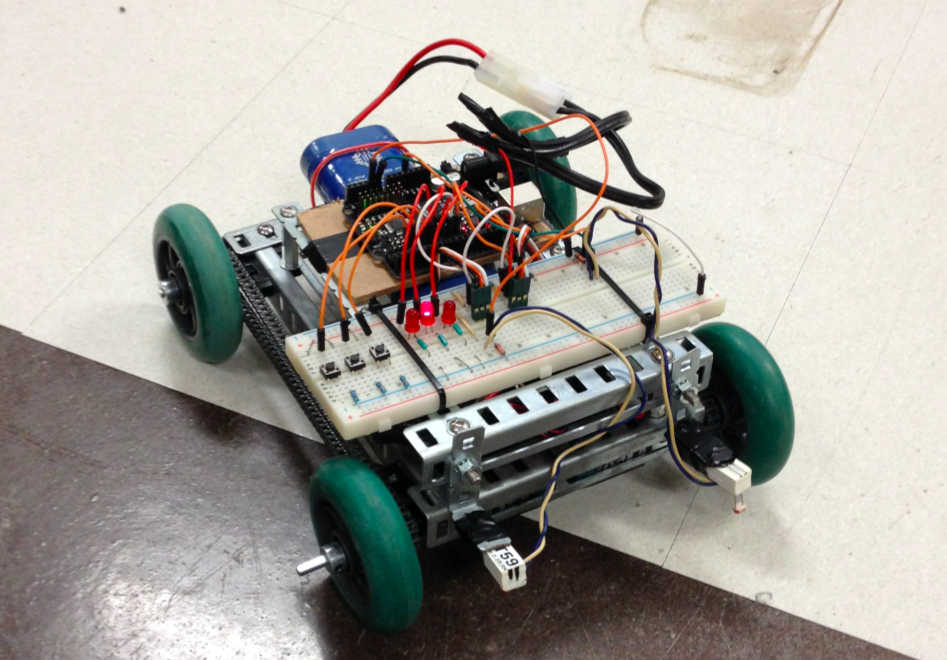
This is Vexter, my first real robot project. Vexter is constructed from VEX components but uses an Arduino UNO for processing. The chassis is approximately 10"x8". It is all-wheel drive with differential steering. The front and rear wheels are connected by chains and sprockets. The turret uses an older 3-wire Vex motor coupled with a variable resistor to monitor the position of the turret.
The first chassis was piece of particle board with two wheels and one motor for each. I was able to procure the rest of the Vex parts and upgrade the chassis. Even though the Vex kits are pricey, I like the ability to develop mechanical concepts without having to fabricate components. In it's first configuration, Vexter only chased a circle of light reflected off the floor. I used that program as a starting point. The code was not too difficult to compose in Arduino, I have some experience using MATLAB. Now I am attempting to recreate the functions of the LMR "First Robot". I am waiting on the Sharp IR sensor but I am going to use some LED's and photocells to develop some code for now.
Ultimately I want Vexter to navigate autonomously to a beacon, pick up the first beacon and then navigate to a second beacon. Eventually I would like to get into making swarm bot but that is a long ways away.
Vexter Mk2 - Light Chaser
A Hide-&-Go-Seek robot that will look for any person and then hides in the dark
- Actuators / output devices: Vex Motors, Direct Drive, Hitec-422
- Control method: IR remote, light
- CPU: arduino uno
- Operating system: Arduino
- Power source: 7.2V 3000Mha
- Programming language: C
- Sensors / input devices: compound eye, Ultrasonic Range Finder, PIR Motion Sensor, Photocells, IR Signal Decoder
- Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/sherlock-aka-vexter-hide-go-seek-robot