

Who doesn't want one? I want a mini autonomous segway!
It started with a garage sale. I came across a guy selling a lot of old school digital Vernier lab tools. I bought the good stuff and went home to plot an evil mastermind project. One of the things I bought was an accelerometer. I thought jokingly "now I can build a self balancing robot." The more I thought about it though, the more I planned. I went to Trossen Robotics' website and bought some necessary self balancing parts.
- 2 Solarbotics gm3 (may be gm9) motors
- 2 solarbotics wheels
- 1 6 volt NiCd battery (AAA cells)
And then from Acroname:
- 1 SN754410 quadruple half H-bridge
I already had an OOPIC II, but I was having program problems and it died (sort of, look for my OOPIC II sob story in the genral forum). In the main picture, the robot looks broken in half, that is because the OOPIC is a backbone of sorts. When I first built the robot, I was very excited but cautious. I decided to take it slow and just test the motors first. So I programmed the OOPIC to drive the motors forward 2 seconds, then backward two second and loop. I turned it on after programming, the motors turned forward two seconds, aaaaand didn't stop. Wonderful. I tried again and this time the motors did totally random things. Stop, start, reverse, one stops, both go opposite directions. Ugh. I decided it was the H-bridge's fault so I sent it in for an exchange of a new one (gotta love returns). I tried again but with the same results. Doubler ugh. So then I took a very critical look at my program and found no errors. I also tried suggestions from members of the Trossen Robotics forum (which is pretty good. Interesting stuff on there). Nothing worked, so now I am convinced the OOPIC II was a little wicky in the wacky-woo. But that doesn't matter anymore cause it is half dead (again, general forum sob story). Oh well, here it is so far.
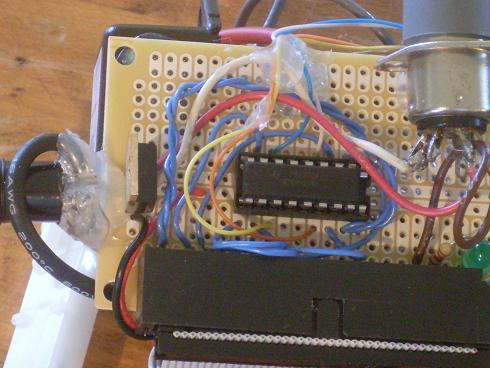
That is a close up of the H-bridge.
The himstergims on the right is the connector for the Vernier Accelerometer. I had to use the connector because the accelerometer itself had that goop stuff to prevent hacking. Doh!
Balance itself and explore
- Actuators / output devices: 2 Solarbotics GM3 motors
- Control method: autonomous
- CPU: OOPIC III+
- Operating system: OOOPIC firmware B.2.X+
- Power source: 6 volt NiCd
- Programming language: VB
- Sensors / input devices: Vernier accelerometer
- Target environment: indoors
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/self-balancing-robot-dismantled