Printed just fine although it went well into the night and I don’t really trust my printer enough to leave it alone. It feels super strong.
I’m quite glad it didn’t warp or curl up at the corners at all. I’ve learned that rounded corners and less contact area can help prevent that.
Getting it off the print bed was a bit of a challenge.
Btw the printer here is a chinese <$200 kit prusa i3 clone that I built (assembled), modified somewhat and calibrated myself.
It came in many hundreds of parts and complete with a very faulty assembly manual.
I’m printing with a 0.6mm head and 0.3333mm layers. It’s actually printing fairly cleanly. There’s a tiny bit of webbing or loose threads here and there but that’s just because I’m skimping on the supports.
[font=Arial, Helvetica, sans-serif][highlight=#ffffff]2304g so far … and it’s not even it’s final form … feels really heavy[/highlight][/font]
[font=Arial, Helvetica, sans-serif][highlight=#ffffff]Also I’m going to trim the belts at some point but I just didn’t know until now how long I was going to need them exactly.[/highlight][/font][font=Arial, Helvetica, sans-serif][/font][font=Arial, Helvetica, sans-serif][highlight=#ffffff]Now that I’m this far I’ll have to make a video of it crashing or trying to crash a beer can or something I guess.[/highlight][/font][font=Arial, Helvetica, sans-serif][highlight=#ffffff]It would be cool to make a control board for it with knobs for each servo. I don’t think it would make sense to try to go the whole gesture and MRL route.
Those extra holes in the hand … this is where I plan to attach stuff that I haven’t designed yet. The two rows of 5 holes are for wrist and the rest are for a decorative cover plate including the ones on the knuckles.
I have a very special design in mind for the wrist. I have no idea whether it’s going to work so I’ll have to experiment in miniature first.[/highlight][/font]
18 ball bearings
28 bolts, 36 for thumb
26 nuts, 34 for thumb
5 pull springs
1 10-turn pot
1 servo, 2 for thumb
1 M3x10 bolt
4 M2x8 bolt
4 M2x12 bolt for thumb
15 printed plastic parts, 16 for thumb
1 big printed plastic palm plate
40cm of 9mm HTD3M belt
TOTAL:
90 ball bearings (4x11x4mm)
148 M4 bolts in various lengths (20, 30, 40, 50)
138 M4 nuts
5 M3x10 bolts
20 M2x8 bolts
4 M2x12 bolts
25 pull springs in various sizes
5 mexican 10-turn pots
5 servo motors (PDI-6221MG-360 continuous rotation servos + the disk shaped attachments)
1 servo motor (PDI-6221MG-180 + the disk shaped attachment)
77 printed plastic parts
200cm of 9mm HTD3M belt (NB! not regular printer belt. This one has bigger teeth.)
So this is going to be the control box. I have a few more pots than I’ll need immediatelly but maybe I’ll need some of them later.
I’m also printing parts that attach to this one and will house an arduino mega.
I discovered that the Arduino megas I have are cheap chinese copies so the geometries are slightly different from the models online. So I had another excuse to model something.
[font=Arial, Helvetica, sans-serif][highlight=#ffffff]Starting to come together.[/highlight][/font][font=Arial, Helvetica, sans-serif][/font][font=Arial, Helvetica, sans-serif][highlight=#ffffff]There are 3 main components:
]Hand/:m] ]Hand controller/:m] ]Remote (on a long cable)/:m]There are 2 arduinos: 1 in the hand controller and 1 inside the remote. The one inside the remote will send digital data to the hand controller which will use this + finger position from finger pot to move the servos in the hand.
[font=Arial, Helvetica, sans-serif][highlight=#ffffff]Just finished programming the arduinos and testing for the first time.[/highlight][/font][font=Arial, Helvetica, sans-serif][highlight=#ffffff]Everything works fine except for one pot that seems to rotate freely and get out of alignment almost immediately. So ring finger doesn’t work at the moment.
First video on my instagram: instagram.com/lumikaarel/[/highlight][/font]
[font=Arial, Helvetica, sans-serif][/font]
If your CAD software allows for motion, you can always check to see it’s operating as desired. As Eric had indicated, the only thing that seems close enough seems to be a variation on a swash plate where the connection points of the links are offset. Might be some type of three point universal joint or variation on a Stewart platform? Dunno, sorry. Still looking forward to seeing the project materialize.
Whoa, nice hand design, keep up the good work!
Check out my wrist model: https://www.thingiverse.com/thing:3051093
sadly Fusion’s kinematic solver can’t simulate my model, but I printed it and it works.
Thanks notaii! Very cool design. I enjoyed watching the video. The pulley system you’ve come up with looks super cool and light weight. You’re using 100kg braided fishing line aren’t you? This stuff is amazingly thin. I wish I had the ability to manufacture custom parts out of metal. Do you have a website or instagram where I could see more of your stuff?
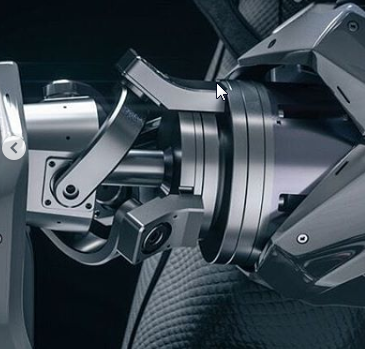
Not a swashplate, also not a Stewart’s platform however I was pointed towards a similar mechanism: https://www.thingiverse.com/thing:2059967 The only difference being the central ball joint which may or may not work. Need to try. It’s too complex for Fusion 360. But now I know that it should work. I ordered some hardware stuff from ebay so that’s going to take forever. But I’m going to try and do some small scale prototyping in the meantime. I want to find out what the power transfer situation is like. The hand is ridiculously big and heavy (~2300g and 30x16x10cm (without thumb)). I will be very pleased if I can move it reasonably.
Yeah that arm is super cool, they even have a commercial version now, sadly I’m not associated with them in any way. Have you read the Thing description? If yes then sorry I might wasn’t clear, that I just watched their video and recreated their wrist design.
I’m trying to be more active in online communities, but besides this LMR account currently I only have a Hackaday.ioaccount, I have a ton of project ideas; my current project is to build a cartesian cnc machine with computer vision for picking up screws from bins and feeding it to a machine, I will document it on this platform and on HAD.
The mechanism you showed looks more robust than mine, but maybe you should consider using just a simple Cardan style joint like this Shadow Dexterous hand.





 … feels really heavy[/highlight][/font]
… feels really heavy[/highlight][/font]













{kind=link}