

Current working name (although I still refer to it as BigBot) is S.K.I.P.P.I.E.
Some
Kinda
Integrated
Programmable
Personal
Intelligent
Entity
Drive Medical Cirrus Plus Power Chair
13" solid wheels
speed 5 mph
range 15 miles
controller PG504 (60A) - 4-key VSI controller
motor 24vdc, 320w, 4600rpm
capacity 300lbs
battery 2 12v, 36A UB12350
Robot
1 - 12v battery 18ah
1 - Arduino Atmega 2560 MCU
1 - Pololu dual VNH5019 motor driver
2 - HC-SR501 IR proximity sensor at base
1 - HC-SR04 ultrasonic distance sensor
4 - IR motion sensors
1 - Kinect (?) tracking array & camera
6-channel remote control overide
voltage monitor
programmed speech
lights & sounds
6-Channel Remote
Power Up
Shut Down
Forward
Reverse
Left
Right
Modes:
1 - Remote Control
2 - Wait for Motion (interaction)
3 - Follow Beacon (return to base)
4 - Wander Around (default)
Drive Medical Cirrus Plus Power Chair stripped down to the base.
Old dual battery tray. I wanted to narrow the base and will only use one battery.
Cleaned up, narrowed with mounting plate and proximity switch bumpswitches.
Top bar was needed to brace it from collapsing inward since the pvc isn´t secured to the metal tubes yet.
I don´t like the metal plate and long bolts in the rear swivel wheel so will replace possibly with 2 corner wheels for stability. Front plate will mount electronics and battery tray will sit recessed between motors and swivel wheel. Base will be covered and body built up with head about 4'or 5´. Arms will be added in the final stage.
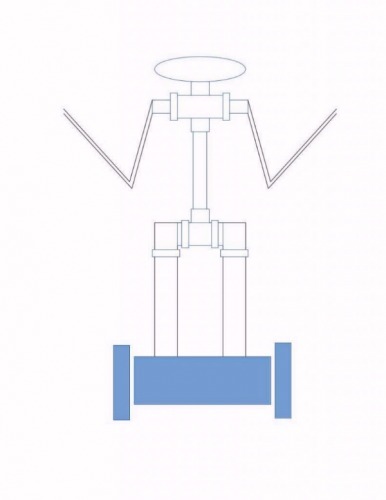
I´m not very good at this but here´s a rough idea of how the robot will look. The blue base is the modified power chair. The body is PVC and designed so that a future upgrade will be adding functional legs instead of the motorized wheels. Ambitious but do-able. I´ll tackle the arms after I get it functional with body and head. Looks like a robot on a Segway. :-)
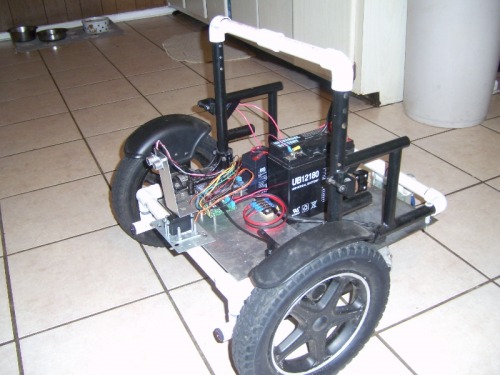
I finally got a bit of time to get back to this robot so here's where I'm at with it right now.
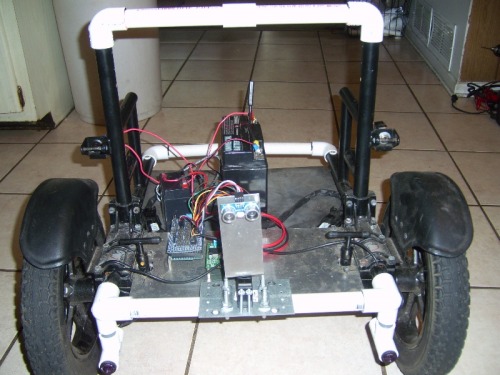
The HC-SR04 ultrasonic and servo are stuck on there just for code testing and will not remain there for long. The 2 IR prox switches are bumper switches for anything it can't roll over or not seen by the HC-SR04. This is basically a larger version of my test platform T.W.E.R.P. except for the additional IR prox sensor.
I had to add the top PVC bar to make it stable since the front and rear bars are not yet permanently attached. I plan on taking an inch off the back to move it in more so I can run the plate bolts through the PVC (the metal plate sags with the battery which is why it's sitting vertical and moved forward).

As you can see from the earlier pictures I redesigned the rear swivel wheel which looks much better but the weight of the drive battery makes the u-bolts slide around the PVC. Need to find a fix for that problem.
Right now I've restructured the code which introduced some new problems so I'm throwing patches at it but will probably have to redo the program flow again before I add any more functionality. I might open up a forum thread for sharing code and ideas for a basic wheeled, obstacle avoiding robot. Hardware wise I need to to add power management to use one battery and make charging easier.
Perform pre-programmed manuevers, interact with people
- Actuators / output devices: Pololu dual VNH5019 motor driver, 4600rpm, dual motor 24vdc 320w
- Control method: RC mode & autonomous mode
- CPU: Arduino Mega 2560
- Power source: 12v SLA 18ah
- Sensors / input devices: IR motion sensing, ultrasonic obstacle detection, IR proximity bumpswitchs
- Target environment: Either for show or demonstrations OR security guard duties
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/s-k-i-p-p-i-e-project-bigbot