

Robotic Operation Unit with Learning envIroment System ( ROULIS ).
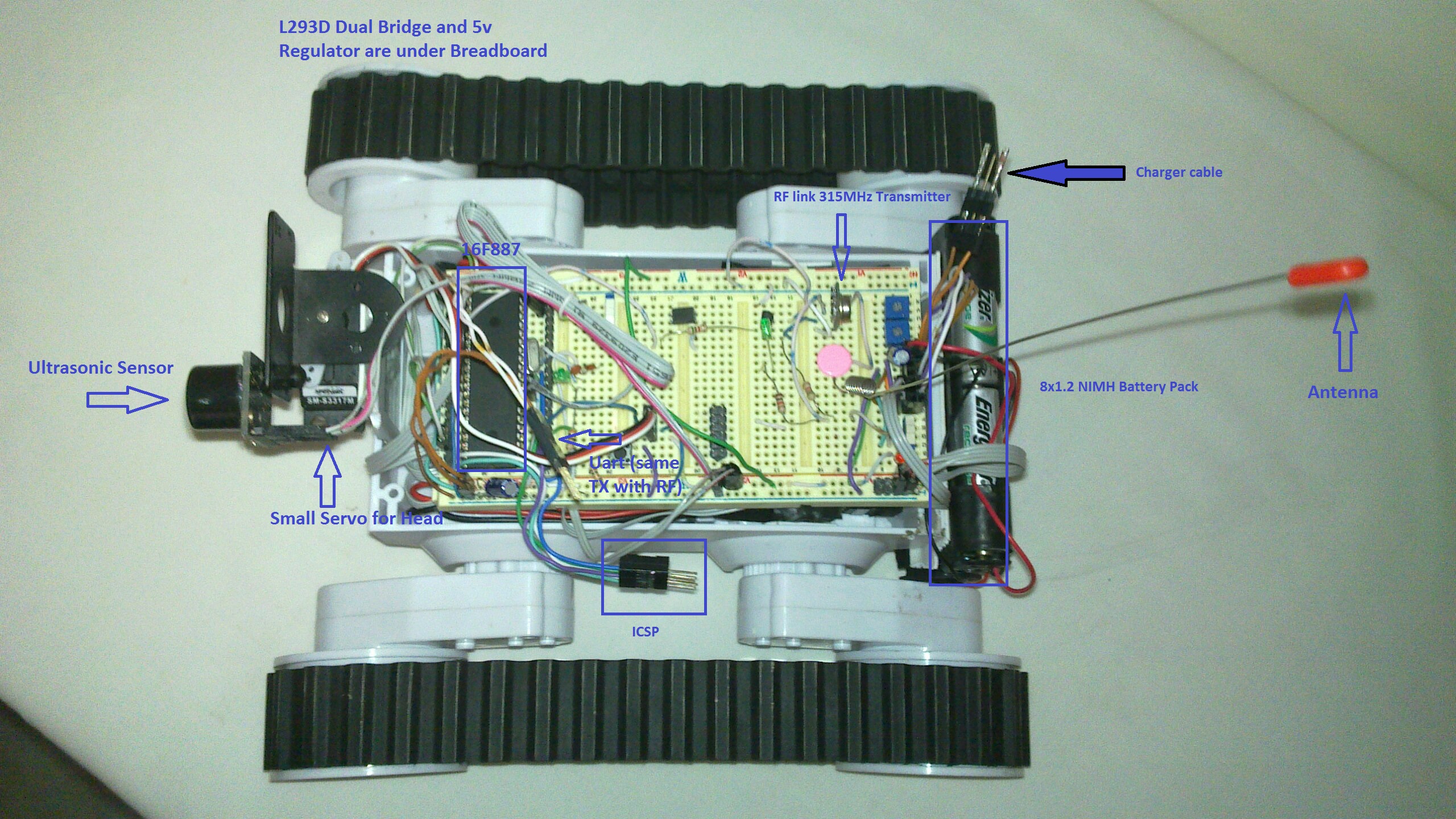
this is my first Rover 5 Autonomous Robot with PIC 16F887 using mikroC and OSA RTOS.The idea is that the robot will scan my appartment and create and store a map of it in internal eeprom.im using an ultrasonic sensor for that mounted on a servo.there are only 3 possible direction (yet) servo can turn (forward,left,right).all scanner readings update the map by reference to his position.
Features & Errors
1. RF Communication with my PC using 2 RF-Link pairs (434Mhz & 315Mhz) (Working on it)
2. Dynamic Wavefront mapping algorithm.(working on it )
3 Some minor fixes with movement (Encoder disk read-errors)
4. 16f887 internal eeprom can holds up to 180 square meters ( Done )
5. More to come...
photos


Navigate around via ultrasonic and create a map
- CPU: PIC16F887
- Power source: 8 1.2v Ni-MH 2000Mah (9.6v)
- Programming language: microC
- Sensors / input devices: Ultrasonic sensors
- Target environment: indoors
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/rover-5-with-pic-16f887-using-mikroc-and-osa-rtos