

PROJETO 02 (BACURI02): Braço robótico 6DOF controlado remotamente sem fio, se uso facilitado e que possa servir para o PROJETO 03 e ser um braço de desenvolvimento de missões, checagem e manutenção do rover.
- Dagu 6DOF
- Usar eletrônica Arduino Mega
- Testar operação do braço robótico com joystick analógico
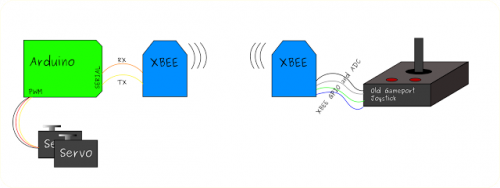
- Testas operação do braço robótico sem fio, via xBee (ou alternativas)
- Programação do braço para movimentos automatizados:
rover check-up: gira em torno do rover para avaliação visual (via amrCam);
recovery rollover (recuperação capotamento): com modulo acelerômetro, o software percebe capotamento/tombamento e aciona braço para destombamento;
aux navCam: auxilia câmera de navegação, qdo em modo navegação, aponta a armCam na mesma direção da navCam proporcionando visão panorâmica e do rover;
rest position (posição de descanso): posição de repouso, com armCam voltada para trás.
- Teste de carga do braço robótico e upgrade dos servos
- Desenvolver com joystick USB (?)
Comprei joystick usado e antigo, analogico com conector gameport (DB-15):

Avaliando compra do Robotic Arm Dagu sem os servos (no AliExpress / Alibaba)
Comprar servos separados (já vistos na HobbyKing)
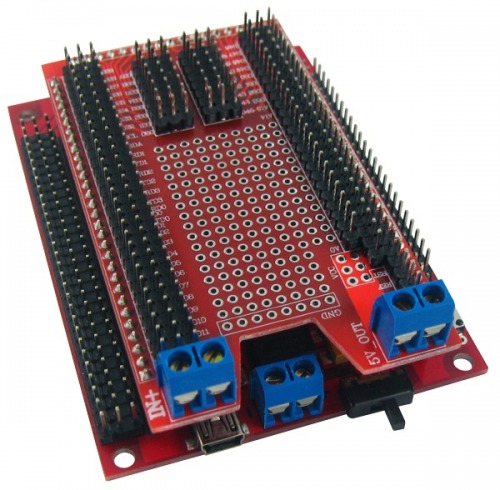
Avaliando eletronica, a principio, uso do Arduino Mega mas existe uma boa opcao que é a placa Spider Dagu que é um Arduino Mega (com pinagem compativel) e tem como vantagem, ter pinagem para conexao direta de servos/sensores, etc e tbm um shield que podemos alimentar com fonte separada - para os servos que exigem mais tensao:
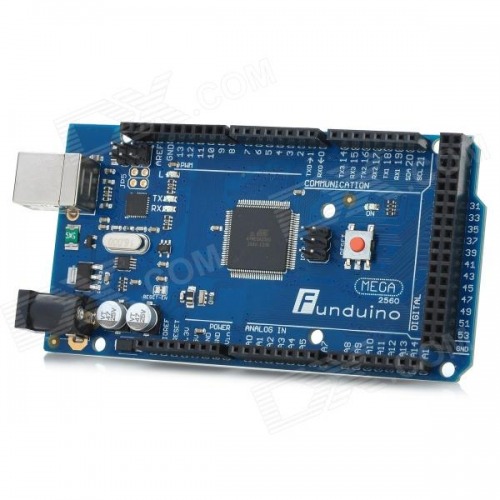
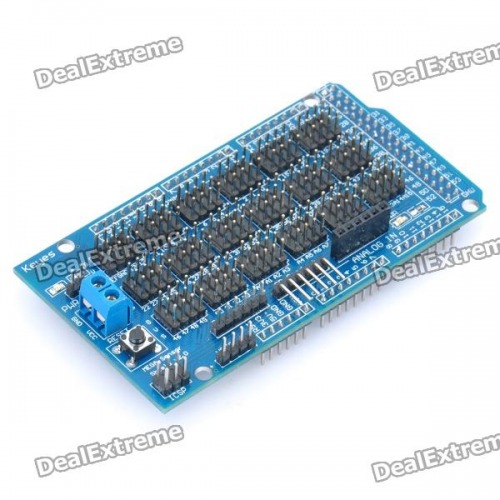
MUDEI DE PLACA CONTROLADORA. Estou comprando (via DX) placa Arduino Mega R3 (compativel, chinesa) com 2 shields. A avaliação técnica é que o Arduino Mega tem processador mais poderoso além do dobro de memoria para armazenamento de codigo, o que permite codificar muito mais e o Mega por si só, abre uma ampla possibilidade de inclusão de sensores e controles e possibilita futura expansão para trabalhar semi-autonomamente. Os shields tbm permitirão flexibilidade.
Tenho que pensar no Arduino Mega num primeiro momento para a leitura do jostick e depois para controle do braço robótico. Tambem tenho que pensar numa futura expansão com XBee para uso do joystick com braço sem fio, remotamente. Alem disso, tenho q pensar nos pinos do Arduino Mega para o controle do rover e do pan/tilt da camera de navegação (NavCam). E outros sensores básicos tbm.

Em fase final, verificar possibilidade de movimentação do braço via radio / xbee: http://blog.ilektronx.com/2012/05/xbee-enabled-rc-joystick-overview.html
Para o rover2, uso de diversos sensores: de gas MQ6 (GLP) e MQ3 (alcool - para missao em posto gasolina)
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/robotic-arm-bacuri02