

I always wanted to make something that is not too hard, yet looks cool. Not long ago I saw Gareth's post about an Arduino Hand (https://www.robotshop.com/letsmakerobots/node/22323) and it really got me inspired. So I decided to make one of my own, but instead of Arduino use my picaxe 28x1, instead of pre-made robotic hand use my own designed one (the one in Gareth's post, in fact, can be bought on ebay) and instead of using expensive servos once again push the limits of those cheap micro ones.
I used organic glass, 5 cheap micro servos, some thread I found at home and a tube I bought from a hardware store.
Also, taught this little guy to play piano and produce some Drum and Bass :D (look at the video)
This is what I managed to do up till now, but I am also waiting for a few materials to arrive and then I am planning to make this hand controlled via glove:


________________________
Update: The controller.
Actually the project was finished more than a month ago, but I was too lazy to update the info at LMR.
The controller glove was made using 5 homemade bendsensors and picaxe 18m2 chip.
The bend sensors are made from resistive, conductive materials and a simple wire. If there'll be enough requests I will make a tutorial, but there are lots of them on the web, thus I do not really see a need for another one.
The principle is simple: When data is received from the five bend sensors it detects the different finger combination, therefore sending a variable through the IR led to the robotic hand. The specific variable, that has been received on the hand controller then decides which finger conbination should be replicated on the robotic hand. Simple as that.
Due to the controller being more confortable, the board and other components were put into a small box. This little box can be clipped to wrist.
Few photos, as well as the video:
The robotic hand with a stand : 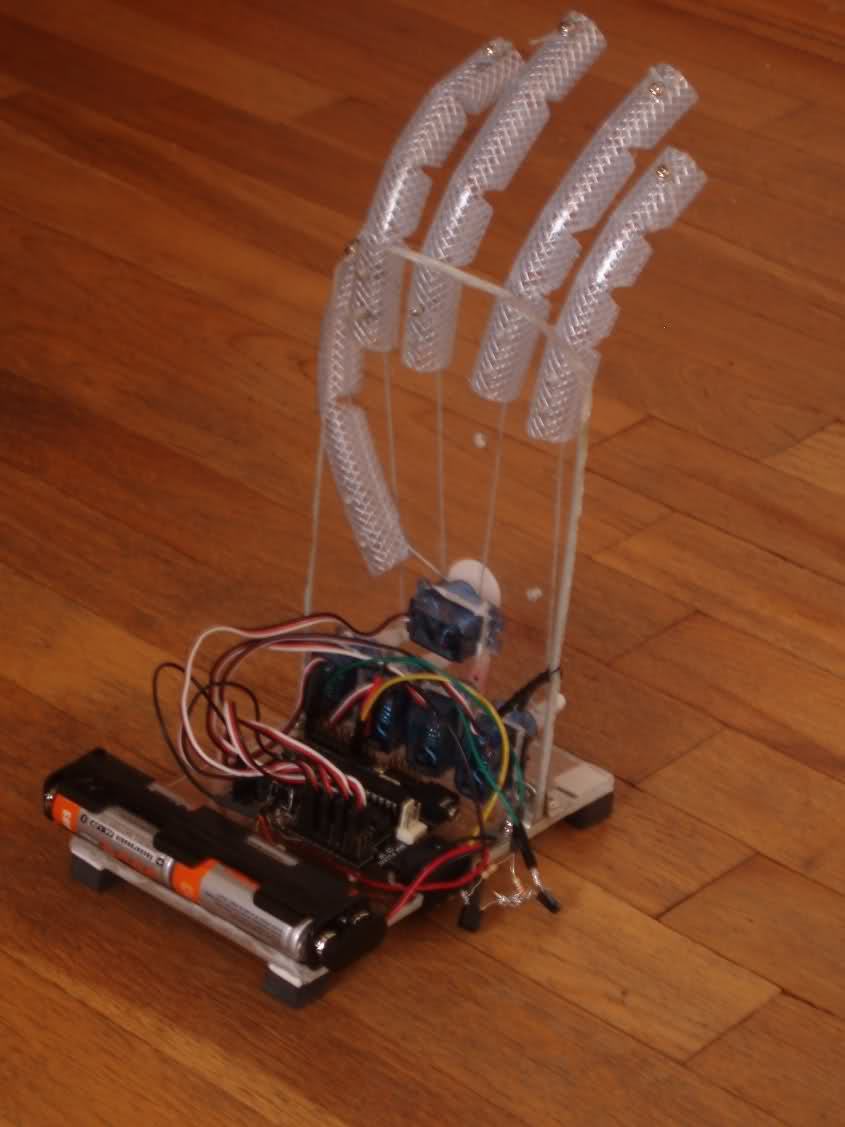
Glove controller in the final stage:
short video:
http://www.4videosharing.com/video/45127/Robotic-hand-preview (sorry for the quality, I really need a new camera :/ )
Moves fingers, flips off everybody, plays my midi controller
- CPU: Picaxe 28x1
- Programming language: Basic
- Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/robot-hand-finished



