

Video added August 16, 2009.
I'm using this platform to experiment with vision processing. It uses the Blackfin Camera with the Matchport WIFI module. The chassis is made of 1/8" light plywood, bass wood, and balsa wood. So far it does pretty well with line following. Now I need to work on some vision based obstacle avoidance so that it can stray off the electrical tape. I am using a first surface mirror to split the camera's view in half so it has a simultaneous view forward and rearward.
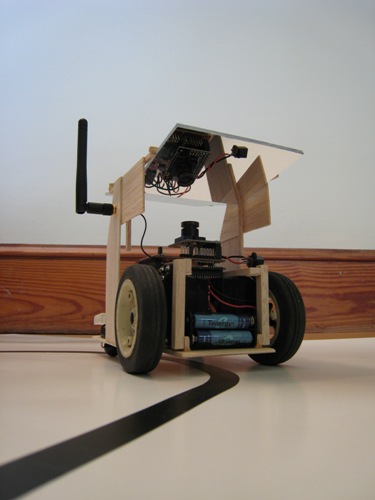
The main drive wheels may be recognized by some of you as the factory wheels and tires from a classic Associated RC10 buggy. The small wheels are large plastic beads from a cheap bracelet I found at a department store. The axles are made from a large paper clip. I plan on replacing them with some Pololu ball casters since Robot Bravo struggles turning a bit depending on the surface it is on. In the mean time it should help to shift more weight to the drive wheels. I have a couple of MaxSonar EZ1 sensors that I'd like to put on, one facing forward and one rearward (I haven't figured out which way is forward quite yet).
This is what Robot Bravo sees in the mirror:

It is similar to an omni camera, but not quite that extreme. I am considering making the mirrors adjustable with a micro servo so that Robot Bravo could see above the horizon when it is not following a line.
Programming of the Blackfin is done over WIFI from my computer directly to the robot. Surveyor Corp. really has a nice setup here. A bit pricey for sure, but it has been a pleasure to work with. I don't recommend it for those without a lot of programming experience though.
Vision guided line following to start with
- Actuators / output devices: junun.org pre-modified servos
- Control method: onboard vision processing and wifi remote
- CPU: Blackfin BF537
- Power source: 8 x AAA 1000mAh NiMH
- Programming language: C
- Sensors / input devices: Omnivision OV7725 VGA Camera
- Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/robot-bravo