

Lego + Raspberry Pi Robot. Has a touch sensor, a infrared sensor, ultrasound sensor, a digital camera for image recognition and streaming video, 3 motors (so far because Im adding 4 more soon). Everything is controled via Web Services so its a Cloud Robot. It has a web interace so it can be controlled via internet and a java interface when Im in fron of my computer.
It has its own webpage: http://imrobotbob.com
Both the NXT and the Raspberry Pi work as webservers connected trough WiFi and with WebServices we can control the actuators and get data from the sensors each have connected.
The programs can be run on both and each is capable of contro the other. So programas can be initiated on the NXT on the Raspberry Pi, my desktop computer or any Server on the Cloud.

Traction System: Two caterpilar tracks with one NXT Mindstorm Motor: http://shop.lego.com/en-US/Interactive-Servo-Motor-9842
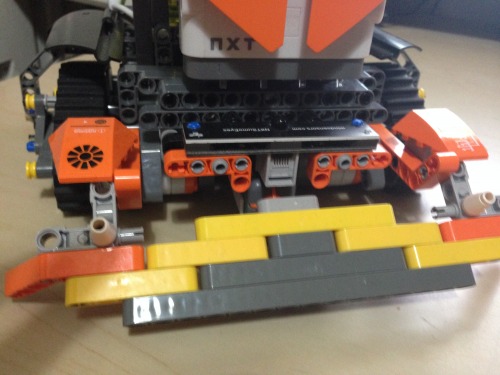
One Mindsensors Sumo Eyes Infra Red Sensor: http://www.mindsensors.com/index.php?module=pagemaster&PAGE_user_op=view_page&PAGE_id=75

One NXT touch sensor, for when the infrared or the ultrasonic fail to detect obstacles: http://shop.lego.com/en-US/Touch-Sensor-9843

One NXT Mindstorm Block, that controls the two motors of the tracks, one for the head, the touch sensor, the infrared sensor, the ultrasonic sensor and the NXT2WIFI sensor.

Another NXT servo motor to move the head.
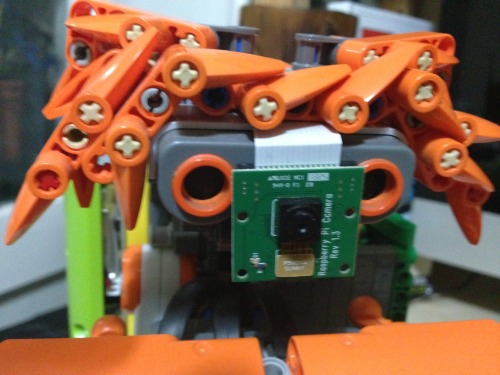
NXT ultransonic sensor + Raspberry Pi camera for object recognition, motion detection and live video streaming
http://shop.lego.com/en-US/Ultrasonic-Sensor-9846
http://www.raspberrypi.org/camera

NXT2WIFI WiFi Sensor for NXT with custom Lego Case
robotics.benedettelli.com/nxt2wifi-lego-wifi-module

Raspberry Pi + Pimorini Toxic Case + Pimorini PiGlow
The Raspberry Pi controls the camera and the TTS so Bob can talk and see.

Even the NXT has a built in speaker I added an extra one for the Raspberry Pi since its more powerful for sound and voice processing.
It can be program to do very diferent tasks. At the moment it has a floor cleaning routine, a navigation routine based on wavefront. It can detect movement and send video via email and Twitter Direct message and it can be remote controlled via a Web Interface, it talks too.
- Actuators / output devices: speaker, 3 NXT motors
- Control method: It can work as autonomous running programs on the NXT block or the Raspberry Pi, or controlled via Web
- CPU: LEGO MINDSTORMS NXT, Raspberry Pi
- Operating system: LEGO NXT firmware, Debian GNU/Linux
- Power source: NXT rechargeable battery, 5V 2000mAh
- Programming language: Python, NXC, node.js
- Sensors / input devices: NXT2WIFI, NXT Ultrasound sensor, NXT touch sensor, Infrared Sumo Sensor
- Target environment: indoor, Companion Robot
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/robot-bob

