tanks for the advice but i
tanks for the advice but i always use these sensors on al my projects and they indeed verry acurant after calibrating .
i sometimes only have a headake implementing them in the code ,i always seem to find a way, but i dont use flowchart or anything just writing on the way could use some help sometimes (some discusions seems to always come up with a solution)
about the grip i was thinking of going to the discount store ACTION and buy one of those anti slip mats to keep your grolsch on its place for in the car and cut it on size
I am building this one for test want to build one on steppers this one is for getting a feel for it .
this feels like childsplay
the picture:
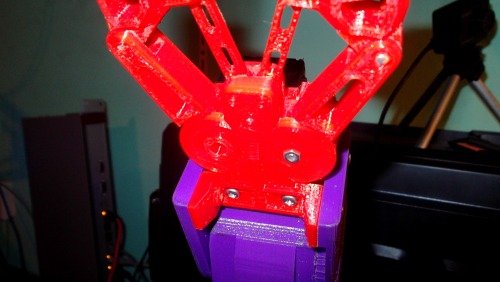
sorry still no gears its al closed in for stabiliy but they look better from the bottum
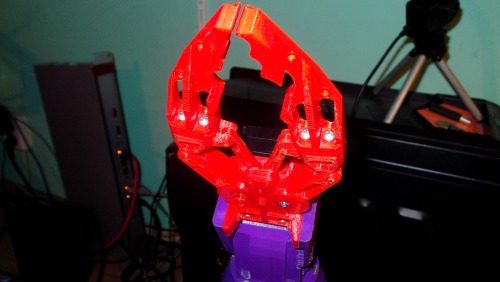
the grippers then .
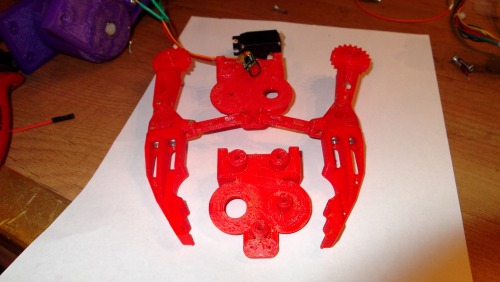
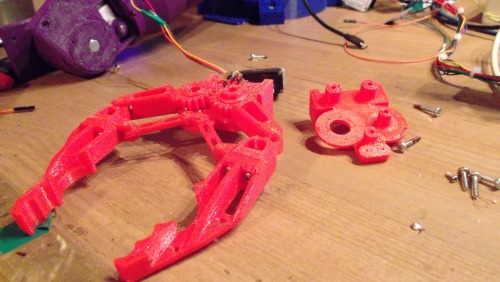
wel today i took it appart to adjust a part
so jeff special pics
Thanks
Thanks, I love it, beautiful design.
I like the way the gears are retained between the matching pieces, also the joints.
It looks tight enough and thick enough to keep the wobble down. I like it all. What is the material?
I don’t have a 3D printer, but if I did I’d try to make a cycloidal drive:
https://en.wikipedia.org/wiki/Cycloidal_drive
and then figure out something to do with it…
We get so hung up in the electronics that we can forget that it all comes down to the underlaying mechanics.
The link looks intresting
The link looks intresting looks ,like it needs a few extra parts
if i got some time left i may design one , i wil let you now i wil keep it small
now im thinking of it it might even work whitout the lobes but with a gear kept ofcentert in some bearings on the drivepins i might check it out
Started on some MIT app
Started on some MIT app inventor tutorials on youtube looking and testing how to connenct it to my bot keep you updated (pfffff … more code to learn)
still writing
still busy with the code client side is finished.
made it comunicate true udp nice fast , make sure the packed size is correct and string convertion is placed correct
going to use multiple poorts to spread load and to minimize miscomunication
back to MIT appinventor , ps is verry user friendly easy to build the base and afterwards finnish the disign
AHHHH NEED MORE OPTIONS
Well well well i kinda stopt with the mit appinventor it is a good programe to make a base code or to get a hang of it
or to get some reference from but to make someting usefull and send udp-string packeds over the internet better take the time and go for someting more profesional
new program of choice :Android Studio 'java’java’java jipie
SMALL PIXLAR MOVIE FOR BENSON
I did a small test run a month ago i asked someone to post it for me but they did not do it so by this i do it myself for al intrested
on the moment i am creating a app so you can controll it all over the world almost ready i wil post a movie as fast as i can
THE LINK https://onedrive.live.com/redir?resid=A168EBA8DE0E6E3F!3701&authkey=!AMQKQtwmOsm650I&ithint=video%2CAVI
files stl
hello nicolini
i think everybody find your work amazing and everybody would like to have your files stl for build the same arm robot like you
it is wonderful if you can give us your files stl and like that perhaps everybody can work on you arm and help you more
it was nice
amby
verry funny
yo amby for the second time Why … there is nobody on this forrum that gave me some good advice to be unest i am a bit disapointed
people only ask for stuf they never come whit some original information what i can not find on the internet whit in 14 sec , solong nobody is sirieus i am not sharing , and then … who is everybody i am developing everyting myself ,the design ,the code ,the interface.
And have never had some help forgive me if i am a little sceptical i am developing this because i thing we builders deserve better then the robots now on the market …
if a am done whit this 2 a 3 months i wil be able to cut burn print grind whit the new model that i am developing whit steppers 6 axis i am bussy whit the tranies now
i am in sirieus need of parts or money , i wil be talking to sponsers this week because i pay for everyting out of my own pocked … power ,location , tools, software , etc
i am trying to keep the development cost low the model that is shown is a kids toy just for some testing,
dont come to me whit the talk that i sould spread the load under people that i have never heard from or talked to (would you ???)
and i am a dedicated person and wil not stop until the robot desk help is ready …even if it ruins me





