

My goal is to build a fully autonomous robot that communicates with my PC via wireless communication.
On computer I wish to display sensor values and allow for user control.
I am interested in implementing a path-finding algorithm similar to that used in computer games, and also having the ability to map its environment and display it on the computer in a 3D world. I think once I figure out how to access a serial port in code, the computer side of the project will be fairly easy. I think the most difficult challenges yet to overcome will be in the communication between the computer and the robot. I already have some zigbee wireless modules I am considering for use in this project, an added bonus of using the zigbee wireless modules would be building a second robot in the future and have them communicate between each other and share mapping data....well lets first see how the this robot progresses.....
A compass sensor for direction, an accelerometer and gyro have already been installed. I have a variety of sensors I will attach as the project progresses: Ultrasonic and laser sensors to determine distance. I am planning on purchasing a GPS unit in the future too. I would like to explore environment mapping, obstacle avoidance and path-finding once the hardware is complete. Although I don't have much time available to work on it, I started it 2+ years ago and work on it every 3 months or so during school breaks.
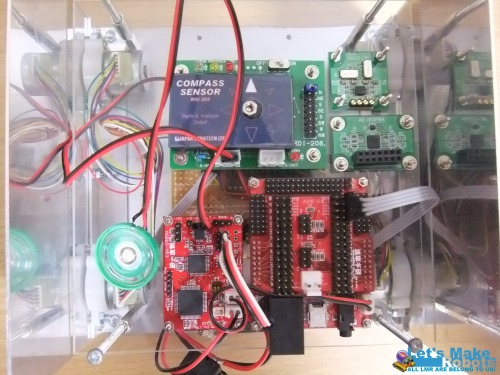
In the above picture you can see a top view of the robot. On the left of the compass sensor are the gyroscope (top right) and accelerometer (under the gyroscope). on the bottom are the mp3 unit and the micro controller board.
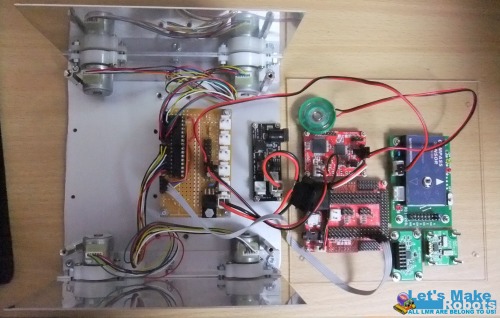
In the above picture you can see a top view of the robot, with the middle layer removed. There are 4 stepper motors and a LiPo battery charger on the right. in the middle is a custom board witch has a 5V regulator and the 2 stepper motor drivers.

I just finished the XBee Adapter boards, on the right is the one to connect to the PC, and on the left is the one that is attached to an Arduino based board using an AVR MCU. Unfortunately I am unable to communicate with one of the modules, so the communication boards are on hold until I replace the faulty module. On the software side, I have started writing a cross-platform RS232 library in C/C++ to allow for comunication with the ZigBee from either Windoze or Linux.
Currently the wheels can turn and it is able to do text to speach (in Japanese)....still needs a lot of work!
- Actuators / output devices: 4 x SPG20-332 stepper motors, driven by 2 TA7774PG ICs. Serial MP3 playback unit with 2Gb SD card.
- Control method: Autonomous.
- CPU: dsPIC33FJ256GP710
- Power source: 7.4V LiPo 1600mA/H
- Programming language: C30
- Sensors / input devices: RDI-208 compass, AE-GYRO-SMD gyroscopic sensor, AE-KXP84 accelerometer sensor, Parallax PING))) ultrasonic sensor, Parallax Laser Range Finder sensor unit.
- Target environment: Indoor flat surfaces.
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/robot-001