

Update 23 Aug 2011:
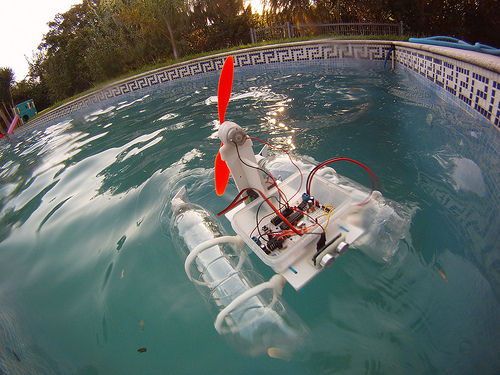
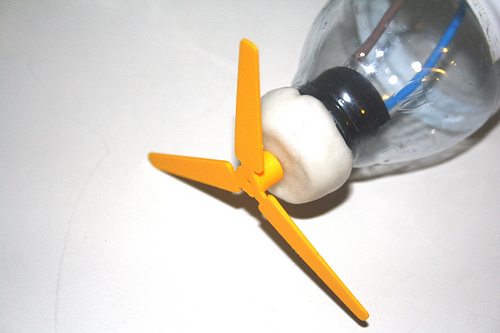
This new version has bigger bottles, only one motor and propeller which operates out of the water and has a servo that controls the double rudder.
-- Original Post --
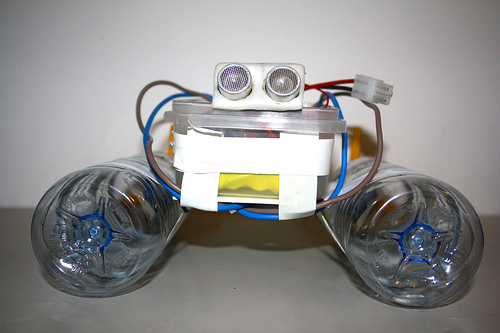
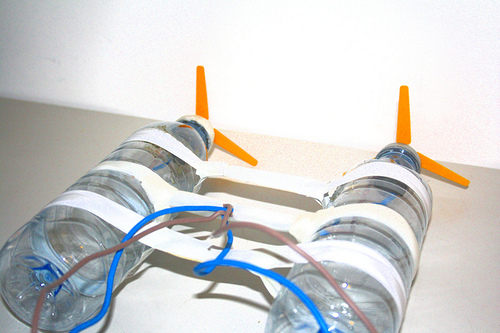
This is a simple robot boat made of water bottles, polymorph plastic, two motors and propellers, tape, a box, a battery and a motoruino.
It is supposed to natigate on a pool, but I haven't had time to test it properly. I will need to buy better propellers first.
I made a instrutible of it and entered it on three different contests. Let's see if I can get something :D
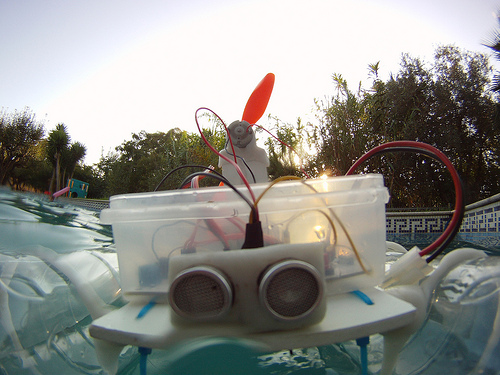
Navigates on water via ultrasound
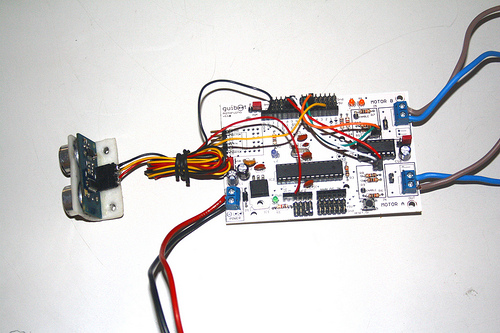
- Actuators / output devices: servo, Motor
- CPU: motoruino
- Power source: 9.6V Battery
- Programming language: Arduino
- Sensors / input devices: SFR05
- Target environment: Calm water
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/roboat-v1
