

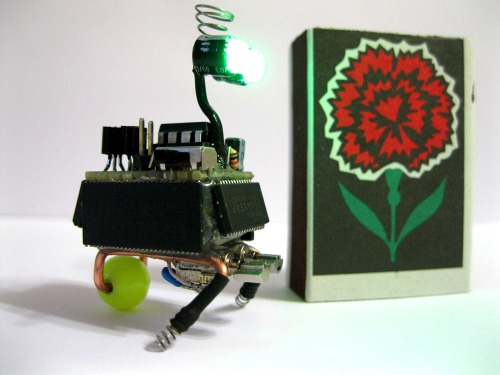
Trash RC Robot))...made from old parts
2 vibro from old mobile phone and PIC 12F629..



This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/robo-art-robot-wall-e-the-biggest-nano-bot-in-the-world
Trash RC Robot))...made from old parts
2 vibro from old mobile phone and PIC 12F629..
(No subject)


wow!
thats looking really nice and cute also. well done! building a robot that tiny isn’t easy at all.
I would really like to watch the video but it says it’s not avaible in my country, for some reason.
"This video is not available
"This video is not available in your country."
About "This video is not available"
Sorry guys!!, bad soundtrack in the video (closed for viewing in many countries), already fixed, try again)))…
It’s very nice! I absolutely
It’s very nice! I absolutely love the controller, with that ball on the joystick.
video is working now.
I did take a look at your youtube channel and you have made some really cool things i have to say. they’re both technical aswell real little artworks. awesome!
Wow, that’s incredible. The
Wow, that’s incredible. The only thing I would complain is that it’s remote controlled. I am working on a similar robot with two pager motors and I am impressed how precise you can steer them. Well done.
What battery are you using?
Thank you)). Li-ion battery
Thank you)). Li-ion battery 200mA, was chosen to fit in size))
**Incredible build. **
Am truly awed by the sheer control in such a small build. And looks marvelous!
Wish I had seen this before building my brushbot. I might have had better success!
Thank you for showing this.
Inspired by your nano-bot
I’m inspired by your nano-bot to have a go making my own. Not planning on a direct copy, because I’m hoping to make my one autonomous (rather than controlled over IR), and maybe get working obstacle detection. I’ve a question about the mechanics - Why did you use a springy foot pointing backwards on the two front ‘feet’? Does the design have to follow that method in order to work? I notice with a couple of other ‘nano-bots’ that are posted online (Harvard’s kilobot and another one called Robo Rizeh) that they are using vertical pins as the robot legs. Any thoughts on that? Could I get away with solid legs vertical? Or pointing backwards?
Also, another thing I’m finding, particularly when designing a very small robot: You have to really plan everything. I’m intending to use an Arduino Mini Pro (one of the smallest Arduinos I’m comfortable to use) and solder the circuitry onto perfboard, rather than use a breadboard, to keep weight to a minimum. I’ve already tested the vibration motor circuit on breadboard, so there’s still a fair way to go! From my previous trials with robotics I’ve found that using less than perfect electronics tends to yield poor results (e.g. circuit interference, and possibly damage to gpio pins).
Looking forward to seeing your next project (as well as finishing my own!).
When I did nano-bot, Wall-E,
When I did nano-bot, Wall-E, have never seen Kilobot no Robo Rizeh (which the author says that altered Kilobot improving mechanics), so had to design everything from scratch. Now I see that the vertical leg is good that that allow you to move in different directions, but very slowly(kilobot) or fast, but with low weight robot(Robo Rizeh),…feet Wall-E is good that that offer greater maneuverability and speed(more than Kilobot) at a higher weight(more than Robo Rizeh), but no reverse. Each design has its good sides.
…legs with springs to improve strength, backward inclined to create the thrust vector forward and tilted to the side in order to create the rotation vector. The left leg is pushing the robot forward and to the right, and the right leg pushes forward and to the left. Depending on the motors vector or added (forward movement) or subtracted (rotation).
Mechanical problems
Hi ukrnano,
Thanks for your reply. I’ve finished the circuitry for my “nano-bot”. I was very troubled by the soldering, which took me ages to plan, and I really struggled to do the fine soldering and then needed to troubleshoot and re-solder a number of the joints. Making small robots is far from easy. It makes me appreciate even more, what you’ve managed to achieve.
My one looks very different to yours, although I am trying leg arrangement similar to the one you used. One of the main differences is that I’m using the button cell vibrating motors, rather than the ones you did. Also, my one is using IR reflection for sensing obstructions.
I’ve tried out three temporary prototype constructions, and I’m finding that the robot doesn’t move anything like the well-behaved way that your one does. At the moment, I’m not sure why this is the case. From looking at your Wall-E, and reading your comments, it appears to me that your motor is positioned to be at the far end of the foot. As such, when the motor moves up-down the force is going from the motor, down the leg, and pushes in that direction.
At some point, I’m planning to post my creation on LMR, but I don’t want to do that until it is moving better and is no longer a temporary construction. Might change the vibration motors at some point, to see if that helps.
I wait with interest video
I wait with interest video with your robot, perhaps after viewing, you will see some ideas for you…
tutorial
can u give me tutorial of this robot or the circuit dagram
(No subject)

Nano Walle
I love the bot, the video, and the song. Well done. Amazing.

