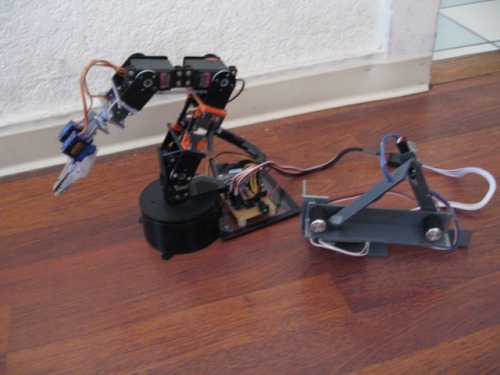
This is a project I did over the summer. I made a robotic arm that is contolled with a 1:1 controller. The robotic arm is basically 4 standard servos and three micro servos. All the mounting parts and turn-table is from lynxmotion. The other parts are made from cut pieces of polycarbonate and PVC angles. The microcontroller is an Arduino. I used the Ardweeny from Solarbotics. There is some electrical and duct tape on it since the cut polycarbonate has sharp edges.
The controller is made of PVC angles and potentiometers. I made the controller like a 1:1 model of the robot arm. The joints are potentiometers. I used servo cables to connect the potentiometers to the microcontroller.
The microcontroller would read the potentiometers and control each servo. The controller has really fine control, but the potentiometers are not perfectly linear. I had to calibrate the potentiometers in the programming.
Update:
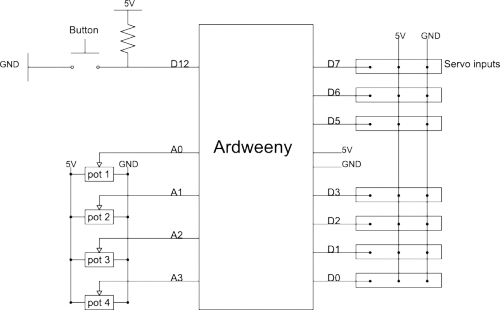
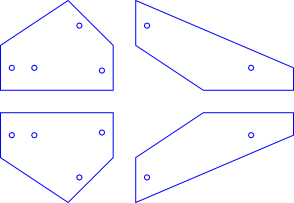
I added the circuit diagram and the claw design. I am going to change the remote design and change the potentiometers since the ones I used before were not very linear. I will post the arduino code once I finish the new remote.
Update 2:
I added the arduino sketches of the project and a new remote design that can be edited in Inkscape. I updated the parts list with the new potentiometers for the new remote. I got the design laser cutted by Ponoko.com. I can't make step by step instructions, but most of the stuff can be bought from RobotShop.com. There are claws and many other stuff for the robot arm from lynxmotion. The remote1.pde is the main sketch, but it needs some parameters that you get by using sense.pde. The comments in the code will help you figure out how to use it.
Update 3:
I thought I posted the code in the last update, but I guess I did not. So here is the code and the remote design.
I often wonder about the base of these robot arms, that rotates the whole thing - that does not require a lot of force to turn it, but it needs some reinforcement (some bearings or resting pivots) not to break the servo. I’ve sometimes seen just bare servos turning that arm, bearing all the load on their own small gears and bearings inside, and just felt so bad about that poor servo. So I really like to see how people make those bases for their arms sturdy, like your nice cylinder right here.
The way this arm is controlled is just too simple to be cool, it’s passed into the realm of awesomeness. I feel like I should have seen this control method before, but I don’t think I have.
The 1:1 control must allow pretty easy control. I’ve done some RC stuff and there’s always a learning curve involved with working the controls. Here, it’s just 1:1, you just do it. Now you need to put this on a tank bot, drive it around and pick stuff up. For no other reason than it would be awesome.
I was wondering, how feasible would it be to make it remember movements and replay them? You could use this 1:1 controller to record movements for your arm and replay them.