

A One Weekend Miracle
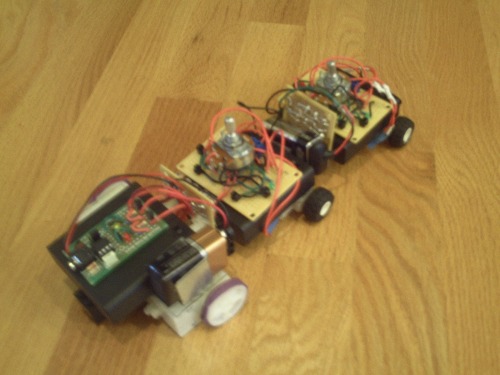
Red Squadron is actually a collection of three robots that work together in order to accomplish a task. The objective for the squad is to make it to a location and stop. I decided to use both digital and analogue brains to show how they can work quite well in harmony. And yes, it is name after a Clone trooper squad and Rebel squad from STAR WARS.(Forgive me for the low resolution pictures, my camera isn't of the highest quality :P )
RED SQUADRON
Red Leader
#Digital
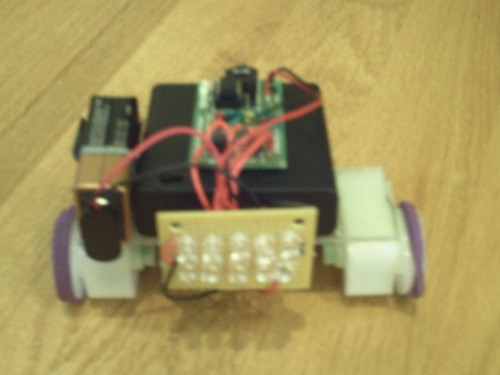
Red Leader is preprogrammed to go to a set location and lead the group to that location. Red Leader uses a simple PICAXE 08M2 with a very simple motor driving circuit that uses the 2907A transistor. Red Leader also has an IR beacon on its back that has a total of 10 IR LED's so that Red 1 is able to track it. All in all, a fairly rudimentary digital robot.
RED LEADER



Red 1
#Analogue1
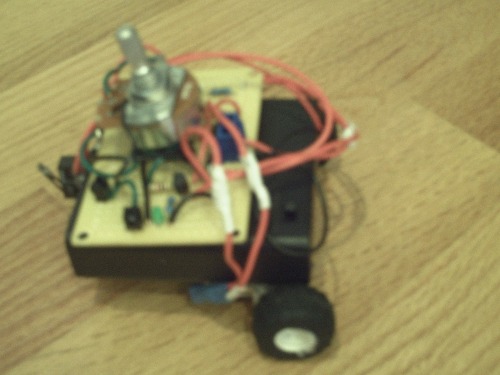
Red 1 takes advantage of the LM393P, a comparotor, by comparing the left and rightside set of photodiodes. Red 1 has a balancing circuit too due to differences in individual sensors. It is also equiped with a bumper switch on the front to avoid stalling the motors and to stop when Red Leader stops. Red 1 also has a double reverse protection circuit in case the batteries are installed backwards, it also has schottky diodes on the motors to prevent motor feedback from damaging the circuit. For the motor driver circuit, it just uses a simple 2907A power circuit. Red 1 also has a 10 LED IR beacon so that RED 2 can follow the pack. Red 1 can be considered as Red 2's big brother.
RED 1


\
Red 2
#Analogue2
Red 2 is basically a clone of Red 1. The only exception is that it does not carry an IR beacon, a 9V battery and a holder to carry it. For more info go to #Analogue1 .
RED 2


Goes to a specific location and stops
- Actuators / output devices: geared motors
- Control method: autonomous
- CPU: Picaxe 08M2 (Red Leader) LM393P (Red 1, Red 2)
- Power source: 9V + 4x AA (Red Squadron)
- Programming language: Picaxe basic (Red Leader)
- Sensors / input devices: 4x IR photodiode (Red 1, Red 2)
- Target environment: indoors, flat service
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/red-squadron