

Robosnail was my first working robot. For nostalga, maybe a challenge entry, and just to have it running again, I'll attempt a rebuild this fun little robot, addiing some of the components previously used, and improving a couple others. In it's intial configuration, Robosnail used CDs as wheels, but that had a few traction problems. The current wheels are scavenged baby stroller wheels, which a set screw has been added to, that attach to a couple of Canon gearmotors.
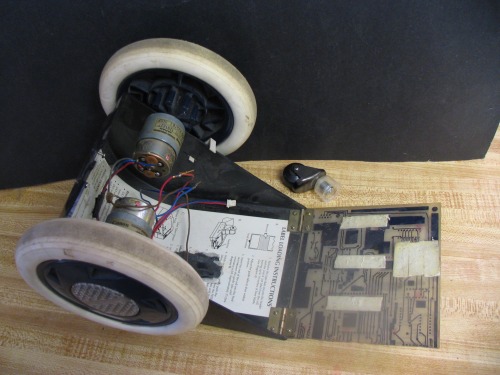
The body of the robot is a paper cover for a label printer, also scavenged. The hinged undercarrage was from a PCB etching that didn't quite work out. and the tail wheel was taken from a discarded suitcase, and bodged together with a bolt and a few nuts.
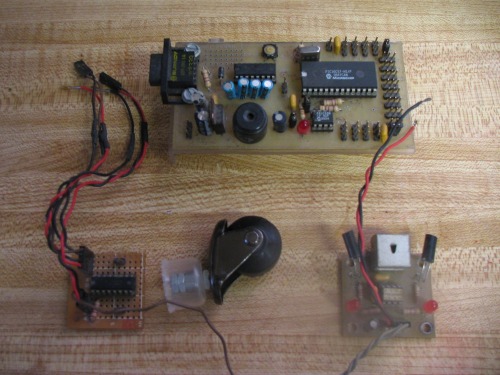
These are the original electronics that were in Robosnail and a couple of more recent robots. The top is a TRaCY Basic Stamp 2 board, with a little piezo speaker, and LED, and power/ground/signal pins for all I/O. The bottom right is an IRPD (infrared proximity detector) that is PIC based. The bottmo left is a hand wired 754410 h-bridge. And the hacked tail caster.

I intend to power Robosnail with this 12 volt battery (previously was a 9.6 I think).

And replace my crappy caster with this fancy smancy dual wheel desk caster.

And maybe eventually replace the sssslllooowww Canon motors with these that are a little quicker. But then would I still call it Robosnail? I don't know.
Navigates very slowly, possibly to enter another challenge
- Actuators / output devices: 2 gear motors
- Control method: autonomous
- CPU: TRaCY Basic Stamp 2 board
- Power source: 12 v NiCd pack
- Programming language: Parallax Basic
- Sensors / input devices: dual IR detectors plus others to be added
- Target environment: Indoor or outdoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/rebuilding-the-robosnail