Thank evrebody 
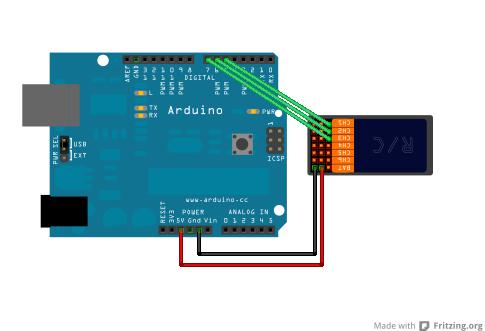
I just found a tutorial of a guy who explain how to do that https://www.sparkfun.com/tutorials/348 but in the tutorial the final code seems to be to easy and i wonder if it include the communication with the L298N and if the speed of the motor can vary.
"The Arduino would be more or less extraneous in this setup and in a sense be going to waste."
I wanna use an arduino for this project for three reason :
- Because i want to learn more aboute arduino
- Because i don’t wan’t to buy RC cc controller ( I’m 15 so ive only some pocket money ^^ )
- Because i would put a anti shock sensor or some another cool stuff who need arduino
Here is the final code of the tutorial :
/
RC PulseIn Joystick Servo Control
By: Nick Poole
SparkFun Electronics
Date: 5
License: CC-BY SA 3.0 - Creative commons share-alike 3.0
use this code however you’d like, just keep this license and
attribute. Let me know if you make hugely, awesome, great changes.
/
int ch1; // Here’s where we’ll keep our channel values
int ch2;
int ch3;
int move; // Forward/Back speed
int turn; // Turning Factor
int pwm_a = 3; //PWM control for motor outputs
int pwm_b = 11; //PWM control for motor outputs
int dir_a = 12; //direction control for motor outputs
int dir_b = 13; //direction control for motor outputs
void setup() {
pinMode(5, INPUT); // Set our input pins as such
pinMode(6, INPUT);
pinMode(7, INPUT);
Serial.begin(9600); // Pour a bowl of Serial (for debugging)
pinMode(pwm_a, OUTPUT); //Set control pins to be outputs
pinMode(pwm_b, OUTPUT);
pinMode(dir_a, OUTPUT);
pinMode(dir_b, OUTPUT);
analogWrite(pwm_a, 0);
analogWrite(pwm_b, 0);
}
void loop() {
ch1 = pulseIn(4, HIGH, 25000); // Read the pulse width of
ch2 = pulseIn(5, HIGH, 25000); // each channel
ch3 = pulseIn(6, HIGH, 25000);
/*
if(ch1>1000){Serial.println(“Left Switch: Engaged”);}
if(ch1<1000){Serial.println(“Left Switch: Disengaged”);}
Serial.print(“Right Stick X:”);
Serial.println(map(ch3, 1000,2000,-500,500));
Serial.print(“Right Stick Y:”);
Serial.println(map(ch2, 1000,2000,-500,500));
Serial.println();
delay(100);
clearAndHome();
*/
move = map(ch2, 1000,2000, -500, 500); //center over zero
move = constrain(move, -255, 255); //only pass values whose absolutes are
//valid pwm values
/What we’re doing here is determining whether we want to move
forward or backward/
if(move>0){digitalWrite(dir_a, 1);digitalWrite(dir_b, 1);};
if(move<0){digitalWrite(dir_a, 0);digitalWrite(dir_b, 0); move=abs(move);};
/Here we’re determining whether a left or a right turn is being
executed/
turn = map(ch1,1000,2000,-500,500);
turn = constrain(turn, -255, 255);
/This is where we do some mixing, by subtracting our “turn”
variable from the appropriate motor’s speed we can execute
a turn in either direction/
if(turn>0){analogWrite(pwm_b, move-turn); analogWrite(pwm_a, move);};
if(turn<0){turn=abs(turn); analogWrite(pwm_a, move-turn); analogWrite(pwm_b, move);};
Serial.print(“move:”); //Serial debugging stuff
Serial.println(move);
Serial.print(“turn:”); //Serial debugging stuff
Serial.println(turn);
Serial.print(“move-turn:”); //Serial debugging stuff
Serial.println(move-turn);
Serial.println(); //Serial debugging stuff
Serial.println();
Serial.println();
}
Thanks again 




{kind=link}