Ok, first of all this is not my robot. It's from one of my buddy ShaoPing @Taiwan who doesn't speak English and shy to post it on LMR. So, I have ask his permission to post it for him because I think it's worth it to share with LMRtians.
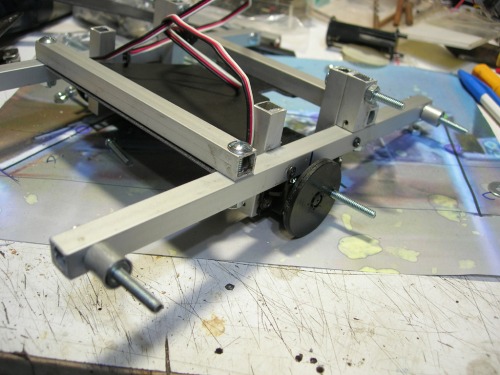
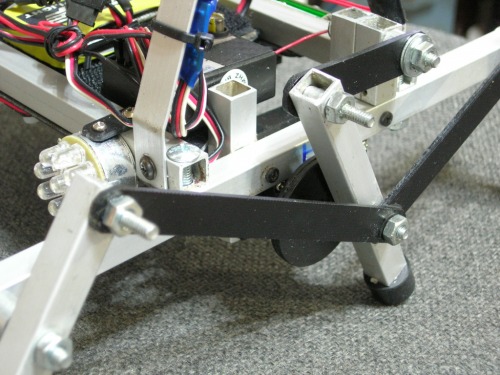
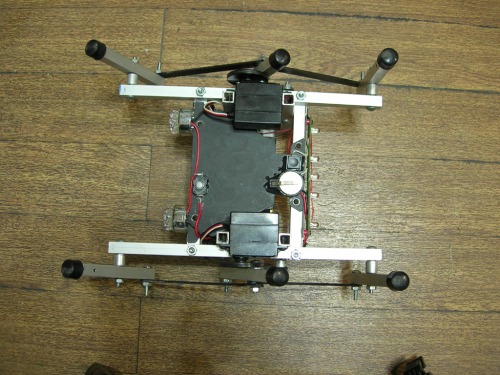
Since I am not the original builder but builder has send me bunch of photos. Images will describe themselves better, so here we go:
Let me know if any of you have further suggestions or any questions, I'll try my best to answer it all and thanks for watching. Enjoy it!
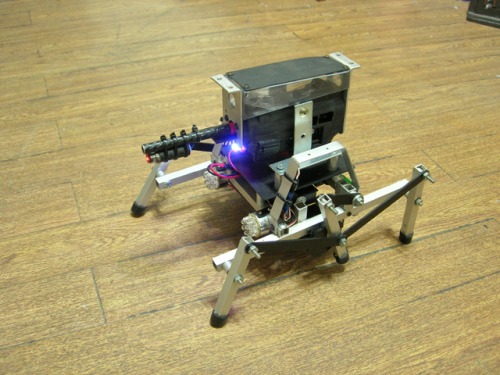
Fly and walk
Actuators / output devices: Two servos modified for continuous rotation, 4 brushless motors
Control method: 2 RC combined
Power source: 11.1 Lipo x1, 3.6V200mAh x1
Target environment: indorr and outdoor, ground and air
Great, a good combination of two different systems. it could be a good base for furtehr development when the weight issue is solved. I guess there is a lot of potential in and this should be improved. Thanks for sharing your friends awesome machine.
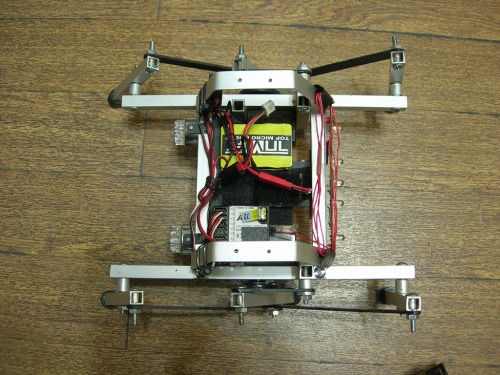
I have to reply my own post since I am thinking about this project. I would give it retractable arms for the rotors (I remember that I saw this a couple of days ago maybe on instructables or youtube). This way the arms could be hold on the back when walking and just moving in the flight position when want to take off.
Being concerned about the weight is ok but that retractable system is not heavy. I am sure you can solve this with just one micro servo and a couple of plastic gear. Anyway, will watch the progress here