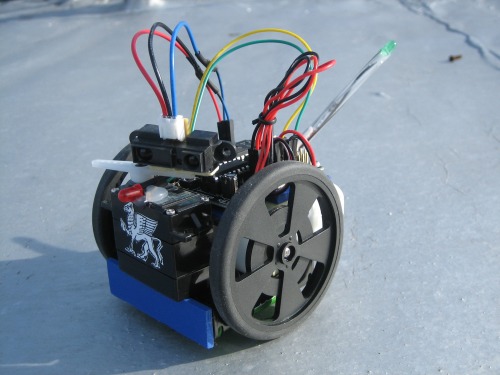
This is the start here robot. I have added a couple of things. I have an LED tail (green) and a LED (red) in the front. The green light is high when no obstacles ahead, and low when obstacles are present. The red light has the opposite code.
I have also added an on/off switch. I got tired of having to take a battery out any time I needed to cut power.
I used a type of plastic called "sintra" that you can get from Solarbotics. It is really easy to use and pretty strong. Dremmels great. It definitely adds some stability to the robot. It also means I can simply unscrew the picaxe board from the robot and not have to deal with double sided tape.
Next step is to add a bump sensor. Really needed as the robot is so low to the ground. I am not really sure how to do this. Any suggestions?
Any ones like this would do the job, with some bumper attached. When the state of the switches changes you bumped into something. Just add a timer where the robot will ignore input for like a second after - as these things have a tendancy to bounce. Wire it to any digital pin, no circuitry really necessary but a pull up resistor wouldn’t hurt. What the hell is a pull up resistor? Read here --> http://www.madsciencenotebook.com/node/4