

Today I am a little slow, but all right.
Yesterday I puked and slept all day.
Friday I was at a party with some good old friends. 3 birthdays in one. The invitation said to bring something creative to the party, and hey - I am a nerd, I cannot sing, so I made a robot.
Designed to blend in, and give the party it's own "pet":
- At the back it had a pen and a stack of "sticky notes". And as a bonus, a holster for "home made cigarettes".
- You could write a note, and put it on the top of it, where it had a flat plate.
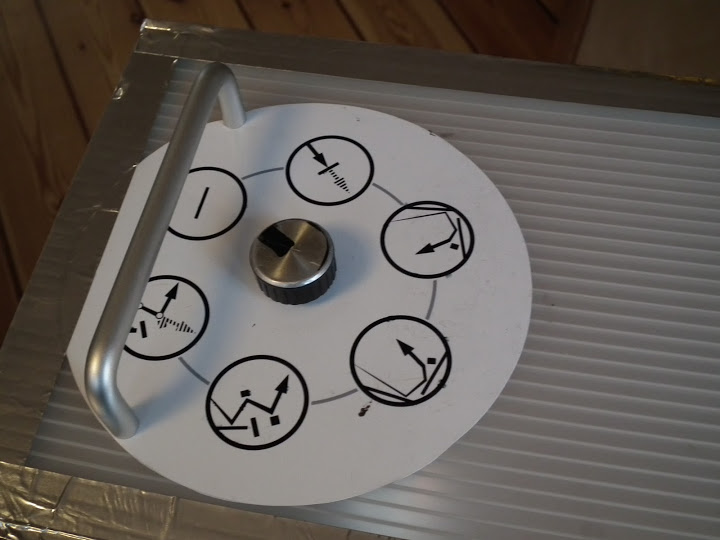
- Then it could be "programmed", by dialling a knob on the top.
These where the choices:
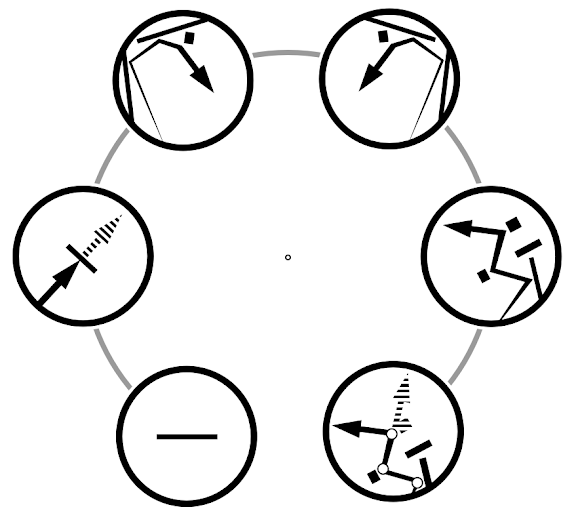
From bottom left and around, they did this:
- Stop
- Drive in a straight line and stop if there was something in front. Move forward if it disappeared.
- Turn right if there was something in front.
- Turn left if there was something in front.
- Non stop mingle from spot to spot.
- Mingle, but pause when something in front, and move on in same direction if it disappeared.
The basic idea was then that you could write a message to someone, or to "everyone at the upper floor" etc, a message with your name on, and who it was for, and then you send it into the crowd, with your best choice of program for the task and situation.
Then as a social "game", if you saw it, and could see that it was in trouble, or heading the wrong way - or if it needed to be upstairs, you could pick it up / re-program / turn in right direction etc.
Holder for paper and pen fell off, it has beer all over it, and the inside is a mess. But it still drives today, when I did the shots.
The "turtle shell" is an old "extreme sport-helmet", adapted with a grinder. The tube is an alloy thing, made to ventilation systems. The belt tracks are from DAGU, the inside is Picaxe 28 X1, the motor driver is a L298 Compact Motor Driver Kit, and the sensors are from Maxbotics. And then there is a speaker.
I started the project Tuesday evening, and the party was friday, I worked evenings only.
Boy, am I tired, here are some pictures, and check the video :)
Cheers! Why is it already Monday tomorrow?
OH yes, the insane moves: I made sure to have everything heavy at the very bottom. The tube is flexible, and when it accelerates, it can lit itself up on the rear of the belt tracks, but then the edge of the helmet touches ground, belt tracks lose grip, the thing breaks, and so it never falls, because it naturally stops motion when it is about to fall back and visa versa. It looks cool, I tell you, you feel like catching the drunk robot from falling, but it does not fall :) Unless there are like stairs, as it has no downwards sensors.
Even if it bumps into a sofa or small table, that makes it go backwards, which makes the sensors see the bottom of the sofa, which makes it back off etc, depending of the current program. Never crashed at the party, as far as I know.






Drives around and participates in a good party!
- Actuators / output devices: DAGU belt tracks
- Control method: Programmed
- CPU: Picaxe 28x1
- Power source: 6xAA
- Programming language: Basic
- Sensors / input devices: 2 Maxbotics Ultrasound
- Target environment: Parties
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/partybot-powerslider

