

I wanted a rover with longer range (WIFI is to short).
On this robot the video and control signals is transferred by a NRF24L01+.
The video is very low resolution and frame-rate (320x240, about 1 frame a second).
And a also build a remote control with a Raspberry Pi 7" Touchscreen Display
The range is at least 400 m.

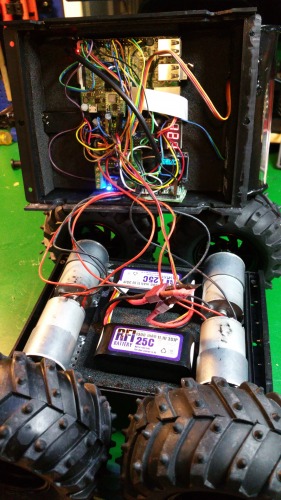
- Motor controller is a Sabertooth 2X5 driving 4 small DC-motors.
- A NoIr Raspberry Pi camera can be tilted up and down by a servo.
- Servo is controlled by a Adafruit 16-Channel 12-bit PWM/Servo Driver.
- A small OLED display to show IP number
- A digital voltage meters.
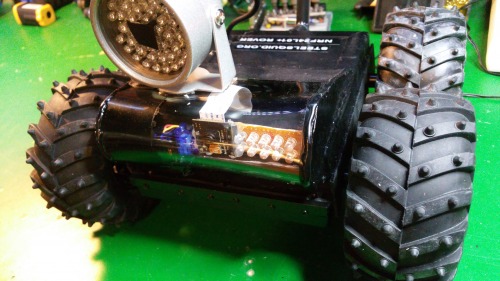
- It has two IR LEDs.
- The first IR LED is fixed to the camera, but that did not work because it is reflected in the protective cover.
- So I fixed a large infrared lamp on top of the rover instead.
- The IR lamp is powered by a extra Buck converter that is controlled by a DIL relay which in turn is connected to a GPIO.
- The protective cover is clear plastic glass that i heated and shaped.
- It is powered by 2 3S LiPo (1300mAh each)
- And a NRF24L01+ to transfer video to the remote control (and receive commands).



- The remote control has a Raspberry Pi 7" Touchscreen Display with Chromium running in kiosk mode.
- I use nodm as display manager to automatically starts an X session at system boot.
- You enable this in Steelsquid Kiss OS by executing: steelsquid browser-on http://localhost/nrf24rover
- A small OLED display to show IP number
- A digital voltage meters.
- Powered by a 3S LiPo (2200 mAh)
- And a NRF24L01+ to transfer commands to the rover (and receive the video)

- The Rover is the master and takes a picture that then is divides into 31 byte packages to transfer to the remote.
- The last byte tells the remote if there is more data or if the whole picture is loaded.
- Between every package from the rover the remote can send a command (drive, tilt or lamp) to the rover (payload ack).
- The remote takes the picture and saves it where the web-server can reach it.
- The HTML5-page has a canvas that you can draw your finger on to tilt the camera and drive the rover.
- Double-tap to enable or disable the IR-lamp.
Robot rover controlled by a NRF24L01+ transceiver
- Control method: NRF24L01
- CPU: Raspberry Pi
- Operating system: Steelsquid Kiss OS
- Programming language: Python
- Target environment: outdoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/nrf24-robot-rover