

INTRO
I haven´t been tinkering with bots long. As a matter of fact, I am rather childish, in the sense that I fall desperately in love with something -bots right now- and that is the only thing I can think of. Woodworking came before bots. Wood carving came before that. Repairing vintage motion picture equipment before that. GPS, playing the harmonica, filmmaking, blogging and Scrapheap Challenge all inhabited my life in the not-so-distant past.
Sadly these love affairs of mine, only last so long. I would give almost anything to ensure an ever-renewing interest in whatever it is that I am into these days. However, and speaking from experience, I know that in the not-so-distant future I´ll fall out of love with this too. My inbox is a living statement to all my past hobbies. I have the nasty habit of signing up for whatever newsletter is remotely connected to what I am interested in, and that haunts me long after I have moved on to another field.
I didn´t mean this introduction to come off this deppresive.
Anyway. Here I am, and loving every second of it (for as long as it lasts) :)
NIGEL
This work-in-progress that I am presenting here is chronologically named A1B0 (taking a page out of Star Wars´ robot nomenclature), but due to its heavy Brittish influences, I decided to call it Nigel (not many names are more brittish than Nigel).
I was lucky enough to run into the Picaxe line of microcontrollers just as I was being sucked into this hobby. I simply love them. They are economic and the Programming Editor plus the Manuals are available for free in their website. You can´t beat that!
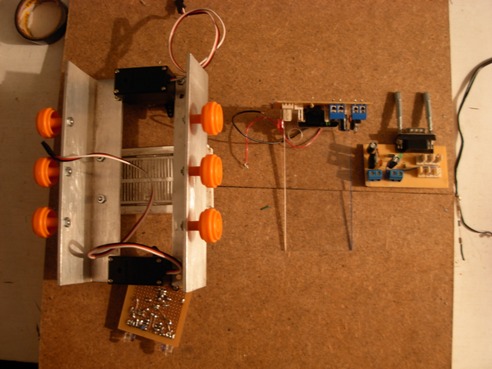
I am designing Nigel to end up being a highly flexible platform. I need it to be able to grow with me. It will be powered (shortly) with 2 Tamiya kits: the #70100 (Track and Wheel Set - that I already have) and the #70097 (Dual Motor Gearbox - that is in the mail).
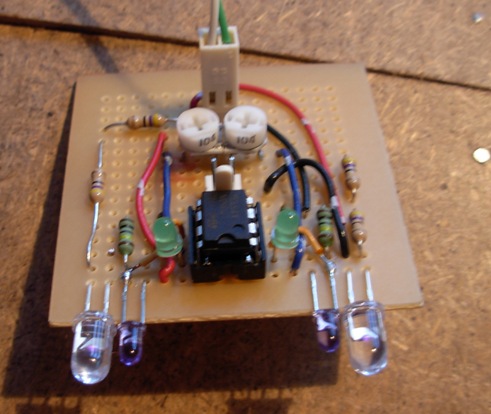
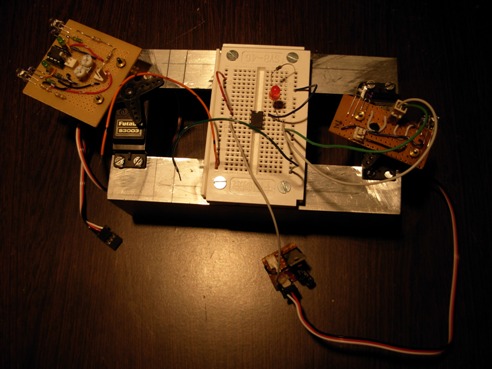
As of right now, as you can see in the picture, there is no locomotion involved. The chassis houses the electronic guts. I have 2 servos mounted on each end. One operates the IR-proximity-sensor-turret and the other operates the motion tracker. Each of them has a Picaxe 08M for brains.
By the way, the spark for the idea of the motion tracker came from a post from Oddbot, a fellow LMR member, that can be found here. I admit that I am a bit lazy and that I only watched the video from the post. There is a wonderful explanation of the theory behind it, with drawings and what-have-yous, but the first thing I saw was the video. That sparked the idea for my own version of it. And to date, I am not sure how related they are, since I have still not read the entire post.
Apart from that, and to cover my ass with regards to any component that I accidentally leave out of a board, I attached the smallest breadboard I could find to the top of Nigel.
That´s all for now. April 17th. 2010.
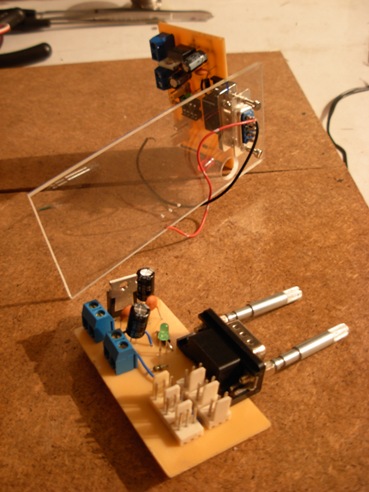
I have decided to place all boards inside of the belly of Nigel, mostly for protection. I´ve cut out a piece of acrylic and fitted it with DB9 female connectors to act as a backplane of sorts. This way I can build Nigel modularly. So far I´ve made (myself) the board that controls the proximity turret (with a Picaxe 08M) and another that will be the main servo driver. This board takes 12v and the signal coming from the motherboard and provides 6 servos with the following: 6v regulated (+ & -) and the position information. You can see all this in the pictures below.
Today I received the Tamiya #70097 (Dual motor Gearbox) that will drive my tracks. I am very excited!
April 25th, 2010
It has been a very frustrating weekend. Sorting out where to place the dual motor assembly, forced me to rethink my design in more ways than one. I came very close to scraping the whole thing. In the end, I kept alterations to a bare minimum and fitted the motors in a more visible area than I would have liked. Anyway. Not much got accomplished this weekend, and the work week is about to start! :(
THIS PROJECT HAS BEEN ABANDONED. MOST OF ITS PARTS MADE THEIR WAY INTO MY NEW PROJECT, that can be found here: https://www.robotshop.com/letsmakerobots/node/27463
See you there!
navigates around using IR and tracks motion
- Actuators / output devices: Non-modified Futaba S3003 servos
- Control method: Autonomous.
- CPU: Picaxe 08M x2
- Sensors / input devices: IR
- Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/nigel-code-name-a1b0