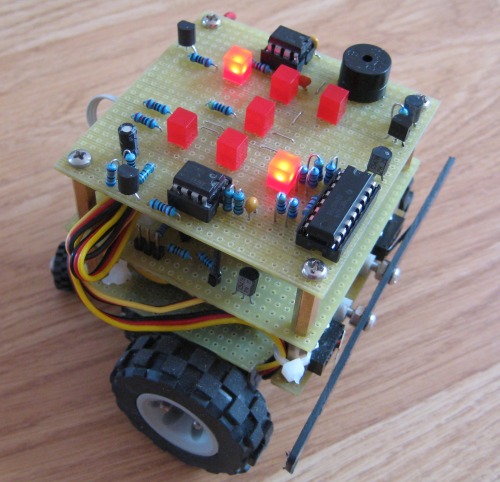
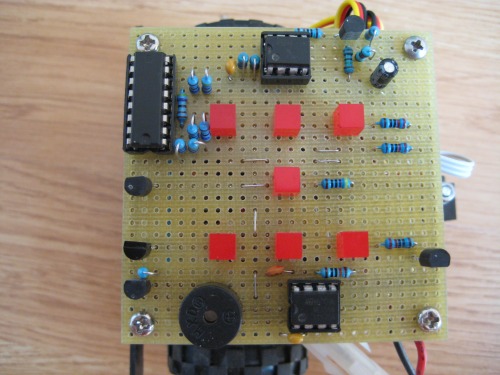
Forget to spin the bottle or throw common dice at your next party --- Mr. Random is in the house. Driven by two hacked (continuous rotation) servos, Mr. Random wanders around on your floor. If the tactile sensor hits an obstacle, the robot reverses, stops, produces a random number from 1 to 6 on LEDs that are similar to the pips on the side of a diceand emits a strange sound.
After the die is cast, the robot turns left or right, depending on a pseudo-random number, which is generated by the random command and activated by the tactile sensor.
The LED-dice is a circuit from the ebook 50 555 CIRCUITS, modified for my needs and additional equipped with a second 555 IC, which is wired as a pulse extender and used as a driver for the beeper.
2010.06.07: Circuit diagram of Mr. Random attached.
Drives around randomly, dices if he hits an obstacle, emits strange sounds
1. Is the angle that the robot turns linked to the randomly-generated number displayed on the dice in any way? from the circuit you posted, I wasn’t sure that it was - not that it SHOULD be, but I was otherwise wondering how you determined the turn angle. This is a question stemming from our shoutbox conversation a while back regarding the most efficient way to survey an enclosed surface.
2. Is the role of IC3 merely to supply AC to the pizo - gated by the pulses from IC2? If the speaker is a buzzer, is it not possible to simply couple it to the output in paralell and achieve the same result? (WARNING: possible stoopid question…)
3. The servos are driven via a IC driver - was there a reason you chose to do that, rather than drive the servos directly via servo commands from the picaxe (and maybe reduce the onboard component count, as well as give you more versatility over motor control…)?
finally:
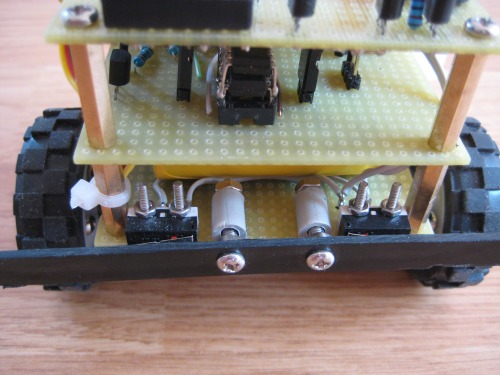
4. I’m VERY interested in the construction of the front bumper, Is is spring mounted to keep it in tension against the micro switches?
1. The robot turns only randomly right or left now after it hit an obstacle. The turn angle is always the same. I have to work on a more advanced code, if I find the time. It is indeed an interesting question, what turn angle is optimal to cover an enclosed surface in the most efficient way. Your graph is interesting, but gives no mathematical proof. Converges or diverges the function for t->∞, how is the function affected by the area geometry, etc?
2. IC3 is a buffer. You can not connect the buzzer directly on the output of IC2 as it would block the clock procedure of the CMOS 4017
3. Simple. I had just two modified servos without PCB.
4. Hope the following drawing make the simple construction more clear:
well, you did not tell me this when we had lunch together…
This idea is great and thinking about this guy on a party makes me smile. Instead of the random sound you could equip it with your text-to-spech module and let it tell a story to each of the numbers.
Oh, another thing…shame on you…you are using superglue and no hotglue? Haha, joking. I really like your clean design witht he nice standoffs and almost industrial grade prefboard installation







{kind=link}