

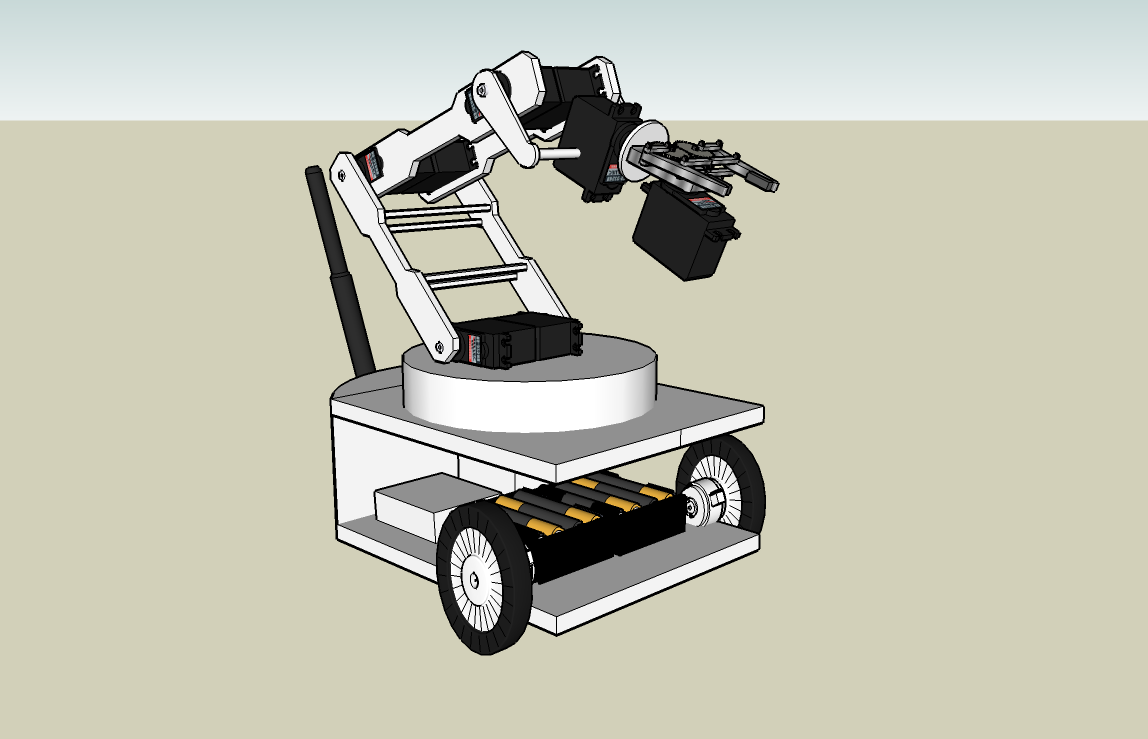
I made this CAD in Google Skechup after I had an epiphany. I thought this would be a really cool idea, and would give me some good experience.
Here is how it will go:
It will use 1/8inch Sintra, simialer to PVC
The Servo brackets will either be custom made from bigbluesaw.com or pre-made from Lynxmotion.com
The gripper itself will also, either be homemade from aluminum or bought.
On the gripper, the actuator of the gripper itself will either be a regular DC motor with a Motor Controller or a Micro Servo (HS-81) Most likely the latter.
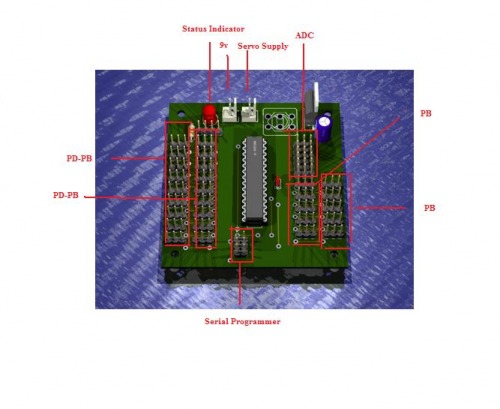
I will be using my custom Atmega8 MCU Board, which has fourteen servo connection ports.

Taken with my webcam so please excuse the crapiness
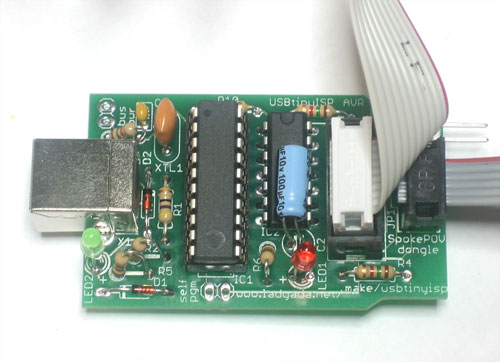
And I made an AVR Programmer from a kit from adafruit
I am aiming to use all eight servos as hs-475hb servos because they are cheap and sturdy (~$15).
It will be controlled via Bluetooth from the UART connection on the Atmega board to a nearby laptop with a Bluetooth USB Dongle.
Eventually I will find a suitable wireless webcam, and skin the plastic off and mount it on the bot.
Does anyone have any reccomendations as to the accessories of this robot? (motors, servos...)
Picks up things with a robot arm
- Actuators / output devices: 8 HS-475HB servos, 2 GM2 224:1 Offset Motors
- Control method: BlueSMiRF Gold
- CPU: atMega8
- Power source: 8 1.2v Ni-MH 2500Mah (9.6v)
- Programming language: C
- Sensors / input devices: 2.4GHz Webcam (eventually)
- Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/mobile-robot-arm
 Robotics is also about presentation IMO. I am going to try to fabricate all of the parts by hand/with a hacksaw/dremel/drill, that will inevitably turn out bad, and I will have to buy from Lynxmotion, I have used their servo brackets before, and they are top-of-the-line.
Robotics is also about presentation IMO. I am going to try to fabricate all of the parts by hand/with a hacksaw/dremel/drill, that will inevitably turn out bad, and I will have to buy from Lynxmotion, I have used their servo brackets before, and they are top-of-the-line. 