

Hi all,
I posted my maze solving robot Mazie V1 a few months ago. While Mazie V1 worked, she was very slow and lumbering, so I have decided to make an upgraded version with a smaller chassis and faster motors.
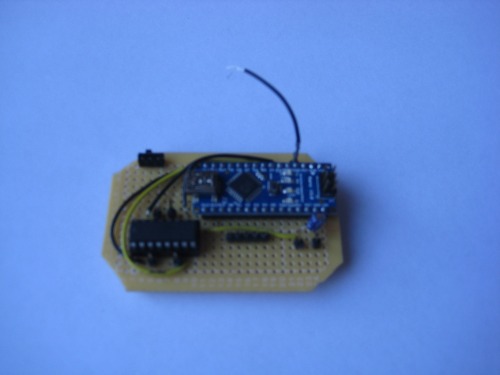
So far I have built the chassis and soldered the main circuit to drive the motors. I still need to connect the line sensors, and of course write the program. Hopefully this will not take too long as I can just modify my original maze solving program to to work with the faster motors.
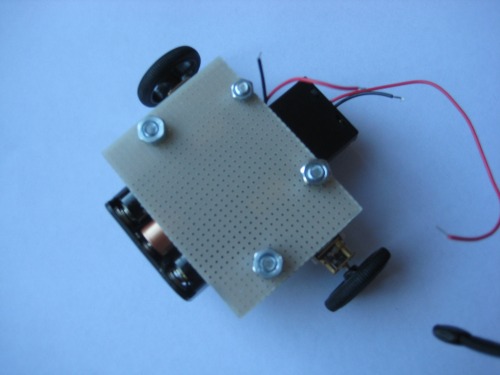
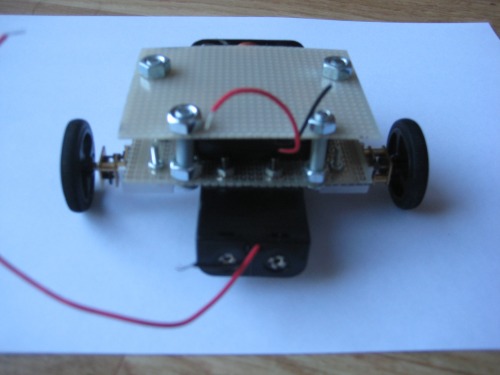
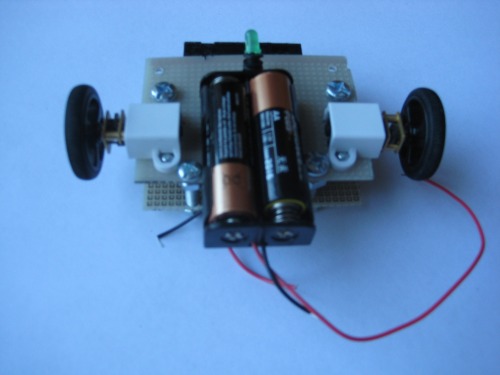
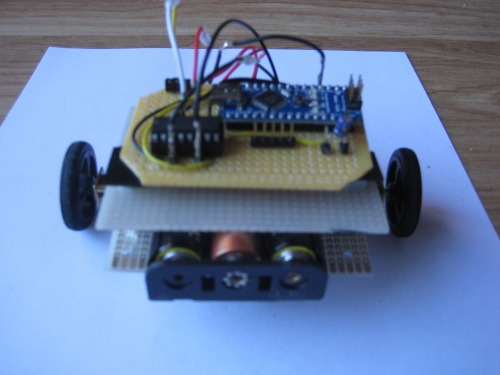
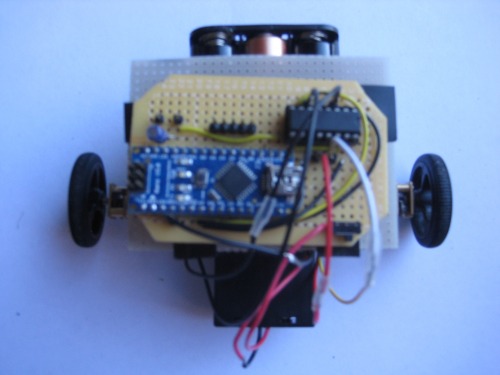
The chassis is made entirely out of scraps of perfboard, just because it was the only material I had lying around. The batteries stick out in funny places as I was trying to make a smaller, more compact robot while still using 5 AA cells (I'm scared of lipos o_o). I didn't have anything very suitable to use as a third wheel so I just soldered a burnt-out LED to the bottom of the perfboard to give Mazie a bit of stability.
I hope to finish and have a video up soon.
Build photos below - sorry for the crappy picture quality, I am using an old camera as my newer one broke :-/
UPDATE 23/10/12 ----------------------------------------------------------------------------------------------------------------------------------------------------------------
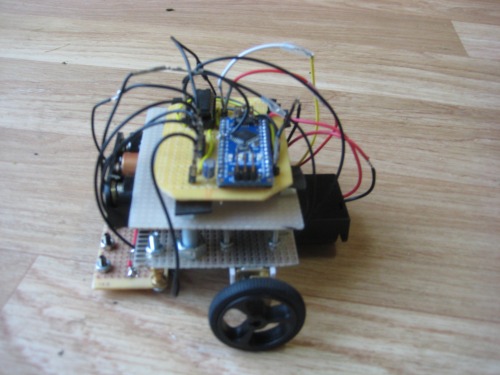
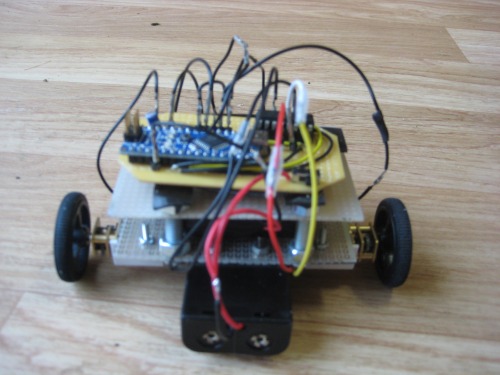
I have now soldered the reflectance sensors onto a strip of perfboard, connected this to the arduino, and begun programming. It is not as simple as I thought it might be - the motors are alot faster than I expected and, rather stupidly, I didn't set up my motor driver circuit for PWM! As I am lazy and can't be bothered to redo the circuit, I am having to implement a sort-of 'manual' PWM where I spin the motors for 2 microseconds then turn them off for 2 microseconds, which reduces the speed enough for the sensors to detect the lines. I am getting there, gradually...
Here are some more blurry pictures for you to enjoy.
UPDATE 24/10/12 -------------------------------------------------------------------------------------------------------------------------------------------------------------------
I've finished the programming and aside from a few occaisional glitches, Mazie 2 seems to work quite nicely. I added a video of her solving a short maze - I ran out of black tape so I had to draw it by hand which was extremely tedious!
The only real problem with Mazie 2 is that the line sensors are positioned too close to the ground, which sometimes causes them to get stuck on creases or lumps in the paper. I have tried to simply move them up and adjust the program accordingly, however when I do this Mazie's line following becomes very erratic and she veers around all over the place. I think this may be because the sensors work best at a very short distance from the paper (the specs say 3mm - 6mm is optimal distance) so when they are further away there are some unreliable readings.
Mazie could do with some fine tuning, but I have decided to put this project on hold for a while now. Hopefully I can get back to it in the future.
solves line mazes
- Actuators / output devices: 2 x 30:1 micro metal gearmotors
- Control method: autonomous
- CPU: Arduino Nano 328
- Power source: 5 AA alkaline cells
- Programming language: Arduino
- Sensors / input devices: 5 QRE1113 analogue reflectance sensors
- Target environment: black line on white paper
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/mazie-v2